 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCorr2Distrib: Making Ambiguous Correspondences an Ally to Predict Reliable 6D Pose Distributions
May 05, 2025We introduce Corr2Distrib, the first correspondence-based method which estimates a 6D camera pose distribution from an RGB image, explaining the observations. Indeed, symmetries and occlusions introduce visual ambiguities, leading to multiple valid poses. While a few recent methods tackle this problem, they do not rely on local correspondences which, according to the BOP Challenge, are currently the most effective way to estimate a single 6DoF pose solution. Using correspondences to estimate a pose distribution is not straightforward, since ambiguous correspondences induced by visual ambiguities drastically decrease the performance of PnP. With Corr2Distrib, we turn these ambiguities into an advantage to recover all valid poses. Corr2Distrib first learns a symmetry-aware representation for each 3D point on the object's surface, characterized by a descriptor and a local frame. This representation enables the generation of 3DoF rotation hypotheses from single 2D-3D correspondences. Next, we refine these hypotheses into a 6DoF pose distribution using PnP and pose scoring. Our experimental evaluations on complex non-synthetic scenes show that Corr2Distrib outperforms state-of-the-art solutions for both pose distribution estimation and single pose estimation from an RGB image, demonstrating the potential of correspondences-based approaches.
BOP-D: Revisiting 6D Pose Estimation Benchmark for Better Evaluation under Visual Ambiguities
Aug 30, 2024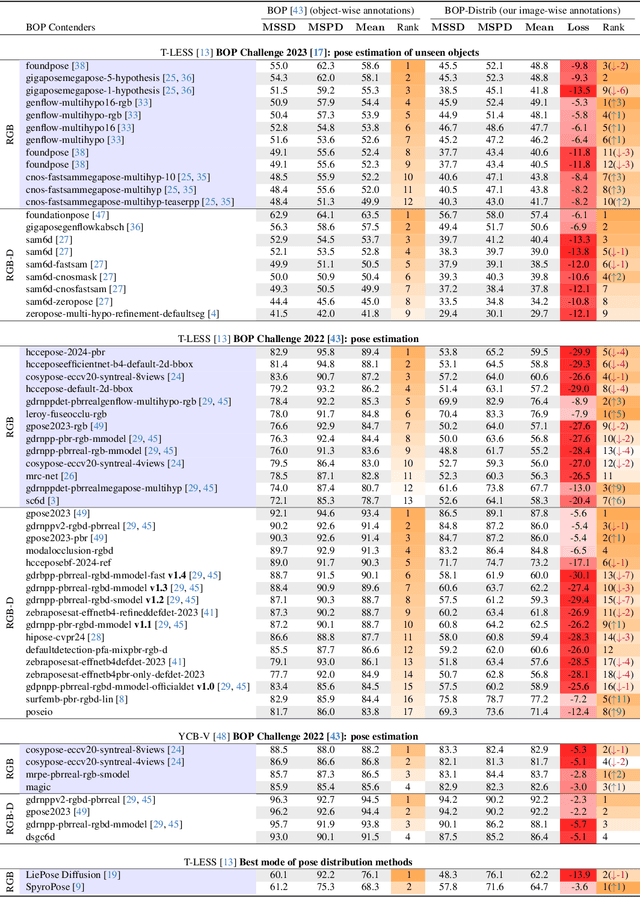
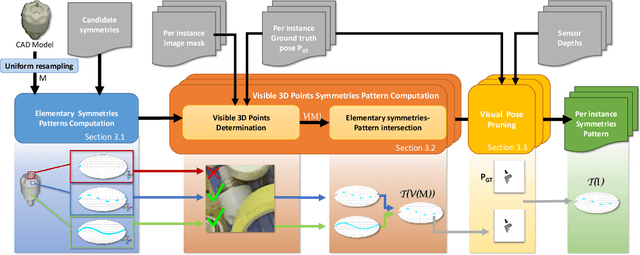
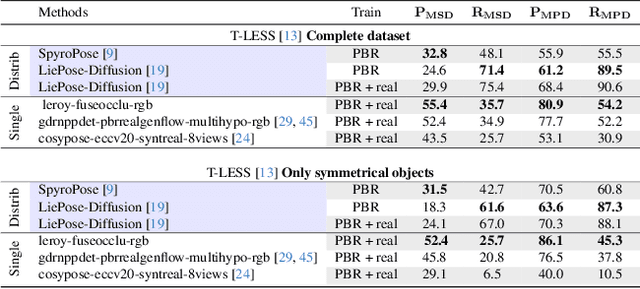
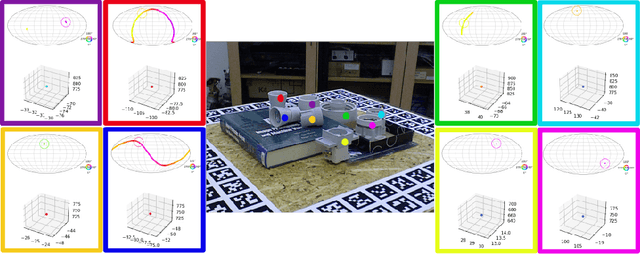
Currently, 6D pose estimation methods are benchmarked on datasets that consider, for their ground truth annotations, visual ambiguities as only related to global object symmetries. However, as previously observed [26], visual ambiguities can also happen depending on the viewpoint or the presence of occluding objects, when disambiguating parts become hidden. The visual ambiguities are therefore actually different across images. We thus first propose an automatic method to re-annotate those datasets with a 6D pose distribution specific to each image, taking into account the visibility of the object surface in the image to correctly determine the visual ambiguities. Given this improved ground truth, we re-evaluate the state-of-the-art methods and show this greatly modify the ranking of these methods. Our annotations also allow us to benchmark recent methods able to estimate a pose distribution on real images for the first time. We will make our annotations for the T-LESS dataset and our code publicly available.
Multi-purpose robot for rehabilitation of small diameter water pipes
May 23, 2024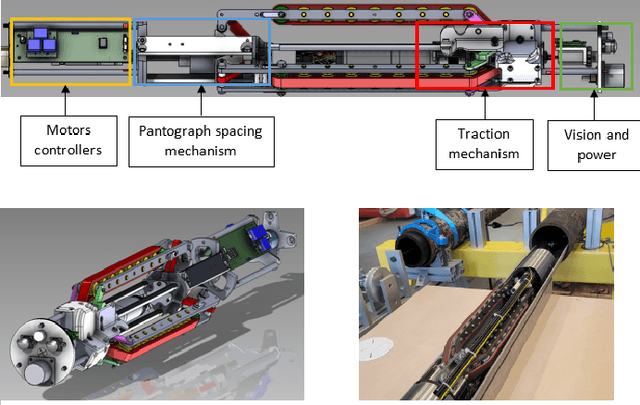

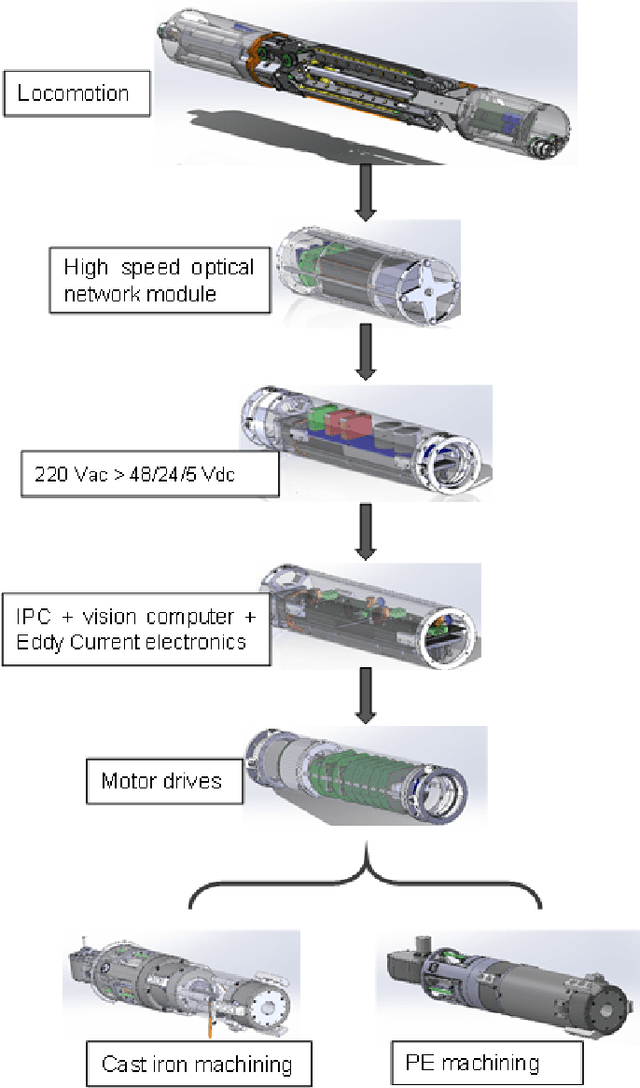
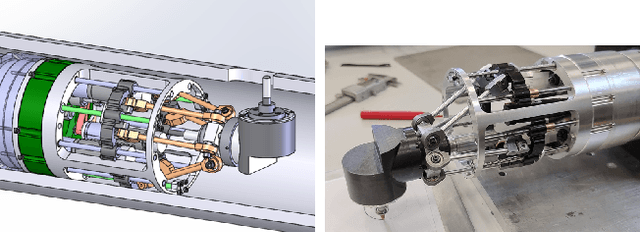
Rehabilitating cast iron pipes through lining offers several advantages, including increased durability, reduced water leaks, and minimal disruption.This approach presents a cost effective and environmentally friendly solution by sealing cracks and joints, extending the pipeline's lifespan, and reducing water wastage, all while avoiding the need for trench excavation. However, due to the relining process, branch connections are sealed and need to be reestablished. To address the issue of rehabilitating small-diameter water pipes, we have designed a modular robot capable of traversing and working within 200 meter long, 100 mm diameter cast iron pipes. This robot is equipped with perception functions to detect, locate, and characterize the branch connections in cast iron pipes and relocate them after lining, as well as machining functions. A first prototype of this system has been developed and validated on an 8 meter long section, in a laboratory environment.
MagHT: a Magnetic Hough Transform for Fast Indoor Place Recognition
Dec 08, 2023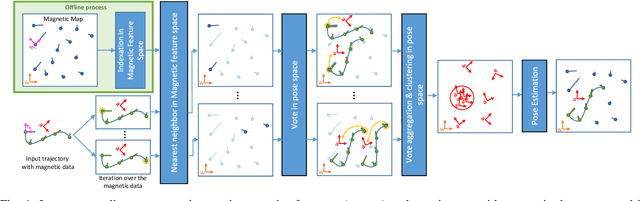
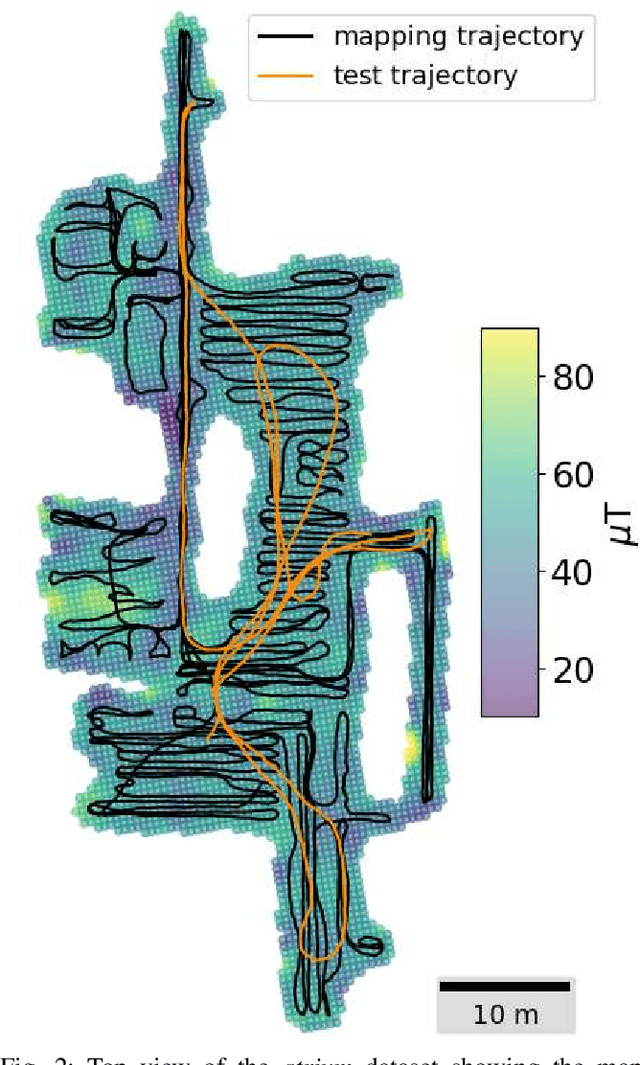
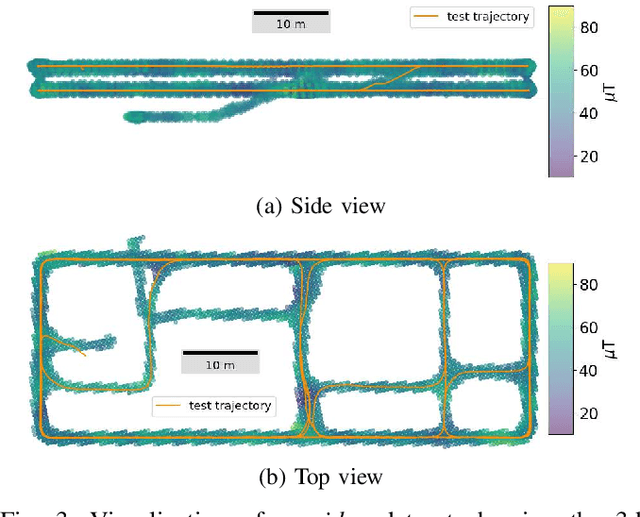
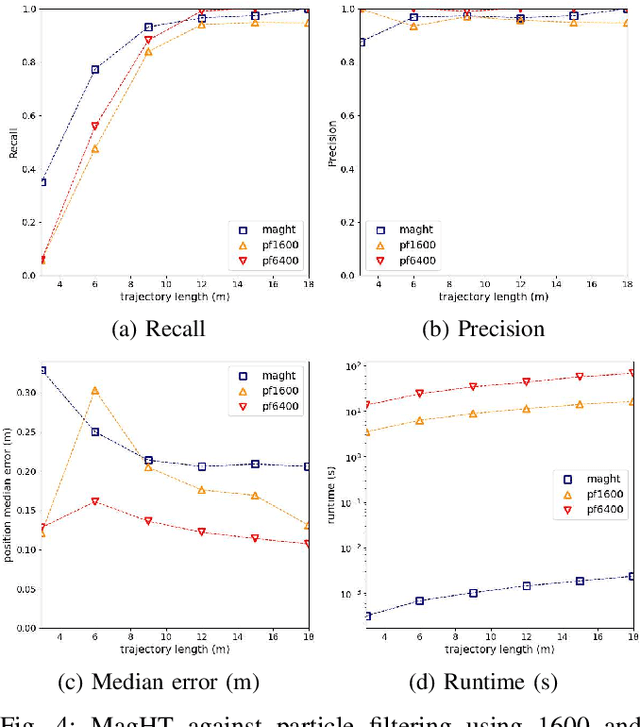
This article proposes a novel indoor magnetic field-based place recognition algorithm that is accurate and fast to compute. For that, we modified the generalized ''Hough Transform'' to process magnetic data (MagHT). It takes as input a sequence of magnetic measures whose relative positions are recovered by an odometry system and recognizes the places in the magnetic map where they were acquired. It also returns the global transformation from the coordinate frame of the input magnetic data to the magnetic map reference frame. Experimental results on several real datasets in large indoor environments demonstrate that the obtained localization error, recall, and precision are similar to or are better than state-of-the-art methods while improving the runtime by several orders of magnitude. Moreover, unlike magnetic sequence matching-based solutions such as DTW, our approach is independent of the path taken during the magnetic map creation.
RING-NeRF: A Versatile Architecture based on Residual Implicit Neural Grids
Dec 06, 2023Since their introduction, Neural Fields have become very popular for 3D reconstruction and new view synthesis. Recent researches focused on accelerating the process, as well as improving the robustness to variation of the observation distance and limited number of supervised viewpoints. However, those approaches often led to dedicated solutions that cannot be easily combined. To tackle this issue, we introduce a new simple but efficient architecture named RING-NeRF, based on Residual Implicit Neural Grids, that provides a control on the level of detail of the mapping function between the scene and the latent spaces. Associated with a distance-aware forward mapping mechanism and a continuous coarse-to-fine reconstruction process, our versatile architecture demonstrates both fast training and state-of-the-art performances in terms of: (1) anti-aliased rendering, (2) reconstruction quality from few supervised viewpoints, and (3) robustness in the absence of appropriate scene-specific initialization for SDF-based NeRFs. We also demonstrate that our architecture can dynamically add grids to increase the details of the reconstruction, opening the way to adaptive reconstruction.