 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRayGaussX: Accelerating Gaussian-Based Ray Marching for Real-Time and High-Quality Novel View Synthesis
Sep 09, 2025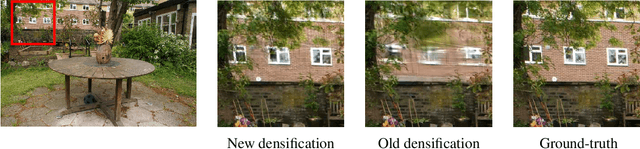
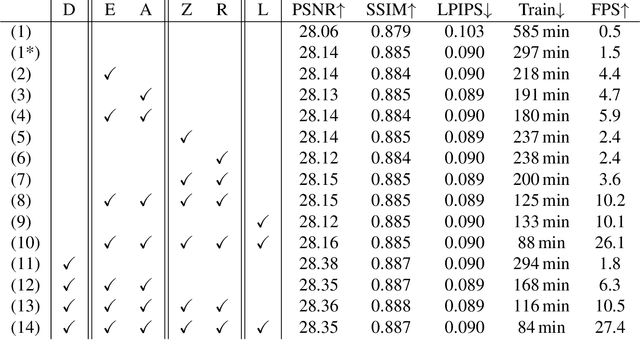
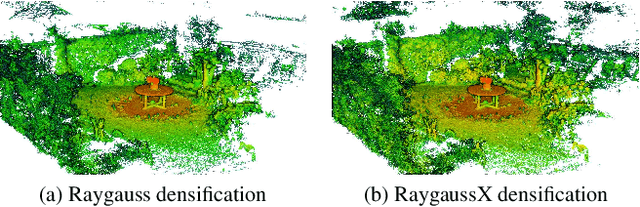

RayGauss has achieved state-of-the-art rendering quality for novel-view synthesis on synthetic and indoor scenes by representing radiance and density fields with irregularly distributed elliptical basis functions, rendered via volume ray casting using a Bounding Volume Hierarchy (BVH). However, its computational cost prevents real-time rendering on real-world scenes. Our approach, RayGaussX, builds on RayGauss by introducing key contributions that accelerate both training and inference. Specifically, we incorporate volumetric rendering acceleration strategies such as empty-space skipping and adaptive sampling, enhance ray coherence, and introduce scale regularization to reduce false-positive intersections. Additionally, we propose a new densification criterion that improves density distribution in distant regions, leading to enhanced graphical quality on larger scenes. As a result, RayGaussX achieves 5x to 12x faster training and 50x to 80x higher rendering speeds (FPS) on real-world datasets while improving visual quality by up to +0.56 dB in PSNR. Project page with videos and code: https://raygaussx.github.io/.
RayGauss: Volumetric Gaussian-Based Ray Casting for Photorealistic Novel View Synthesis
Aug 06, 2024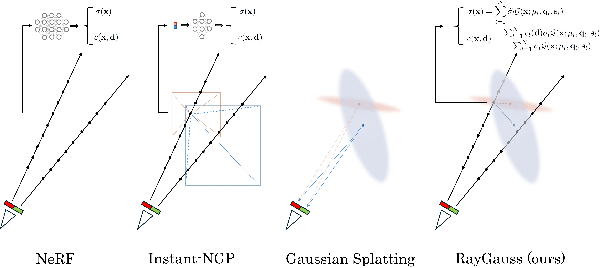
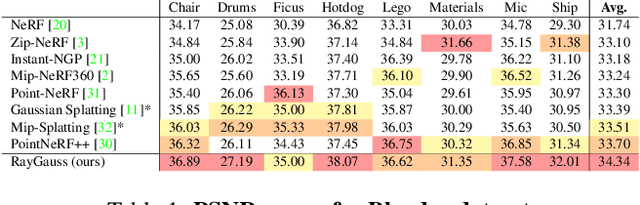
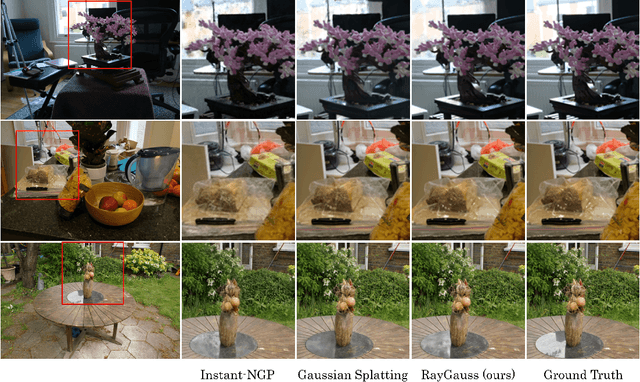

Differentiable volumetric rendering-based methods made significant progress in novel view synthesis. On one hand, innovative methods have replaced the Neural Radiance Fields (NeRF) network with locally parameterized structures, enabling high-quality renderings in a reasonable time. On the other hand, approaches have used differentiable splatting instead of NeRF's ray casting to optimize radiance fields rapidly using Gaussian kernels, allowing for fine adaptation to the scene. However, differentiable ray casting of irregularly spaced kernels has been scarcely explored, while splatting, despite enabling fast rendering times, is susceptible to clearly visible artifacts. Our work closes this gap by providing a physically consistent formulation of the emitted radiance c and density {\sigma}, decomposed with Gaussian functions associated with Spherical Gaussians/Harmonics for all-frequency colorimetric representation. We also introduce a method enabling differentiable ray casting of irregularly distributed Gaussians using an algorithm that integrates radiance fields slab by slab and leverages a BVH structure. This allows our approach to finely adapt to the scene while avoiding splatting artifacts. As a result, we achieve superior rendering quality compared to the state-of-the-art while maintaining reasonable training times and achieving inference speeds of 25 FPS on the Blender dataset. Project page with videos and code: https://raygauss.github.io/
MagHT: a Magnetic Hough Transform for Fast Indoor Place Recognition
Dec 08, 2023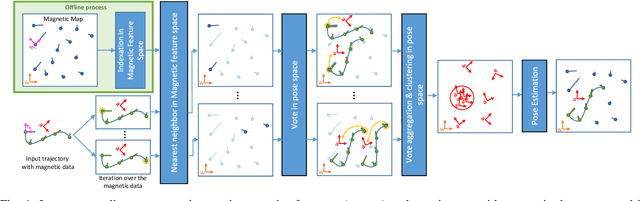
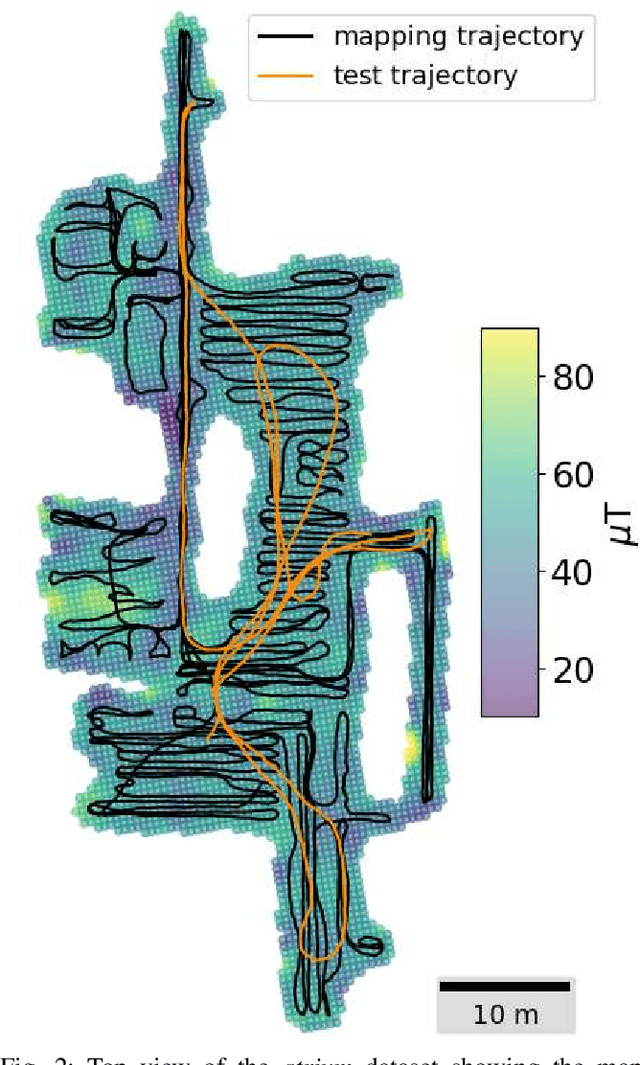
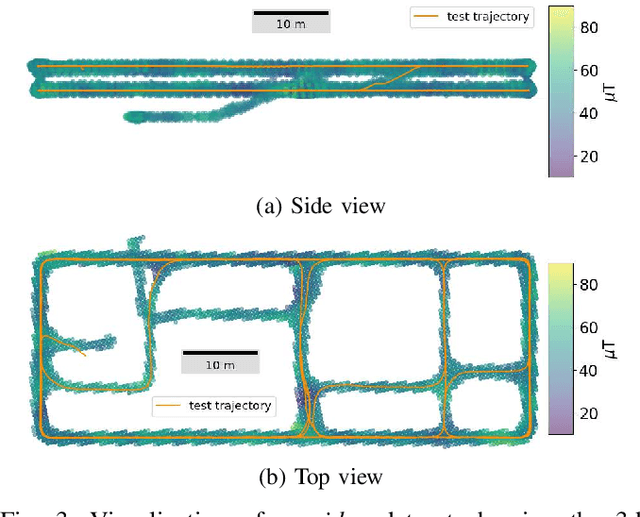
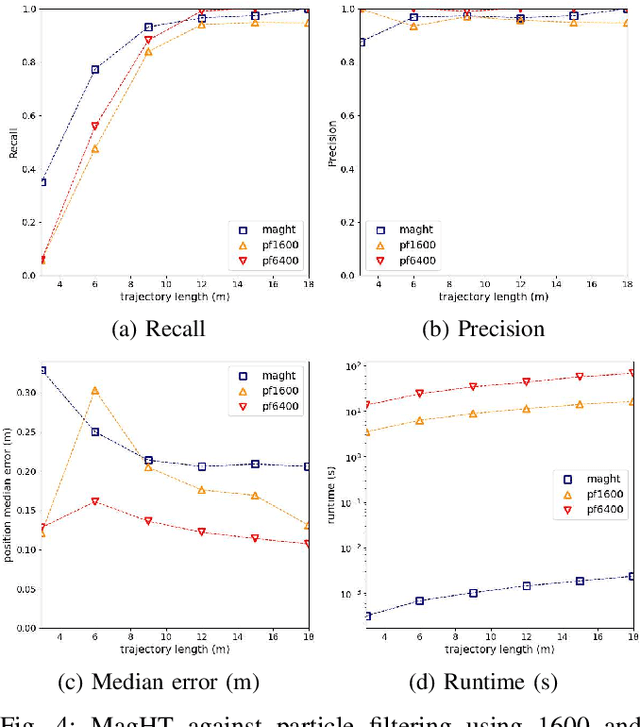
This article proposes a novel indoor magnetic field-based place recognition algorithm that is accurate and fast to compute. For that, we modified the generalized ''Hough Transform'' to process magnetic data (MagHT). It takes as input a sequence of magnetic measures whose relative positions are recovered by an odometry system and recognizes the places in the magnetic map where they were acquired. It also returns the global transformation from the coordinate frame of the input magnetic data to the magnetic map reference frame. Experimental results on several real datasets in large indoor environments demonstrate that the obtained localization error, recall, and precision are similar to or are better than state-of-the-art methods while improving the runtime by several orders of magnitude. Moreover, unlike magnetic sequence matching-based solutions such as DTW, our approach is independent of the path taken during the magnetic map creation.