 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle-Pixel Image Reconstruction Based on Block Compressive Sensing and Deep Learning
Jul 14, 2022
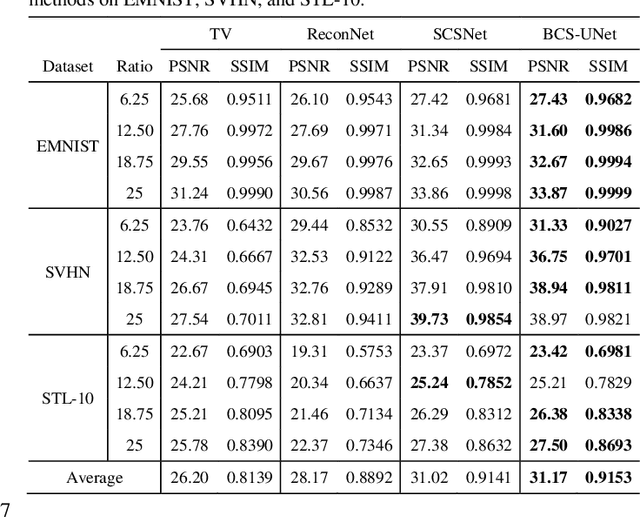
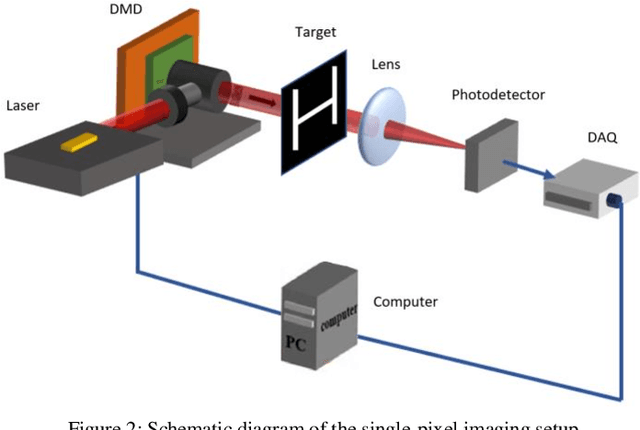
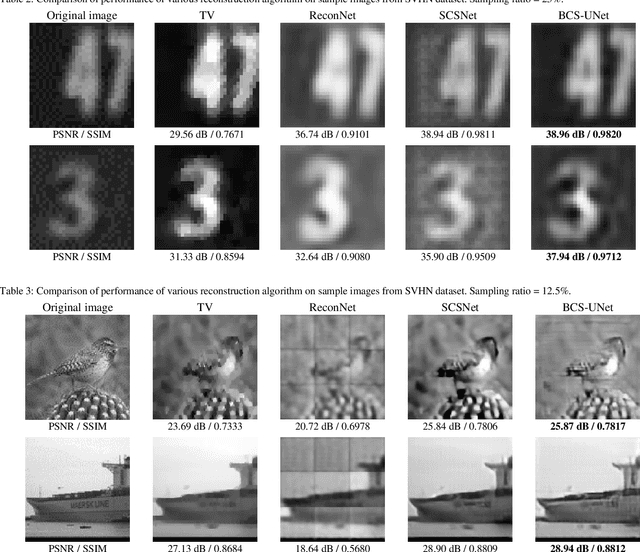
Single-pixel imaging (SPI) is a novel imaging technique whose working principle is based on the compressive sensing (CS) theory. In SPI, data is obtained through a series of compressive measurements and the corresponding image is reconstructed. Typically, the reconstruction algorithm such as basis pursuit relies on the sparsity assumption in images. However, recent advances in deep learning have found its uses in reconstructing CS images. Despite showing a promising result in simulations, it is often unclear how such an algorithm can be implemented in an actual SPI setup. In this paper, we demonstrate the use of deep learning on the reconstruction of SPI images in conjunction with block compressive sensing (BCS). We also proposed a novel reconstruction model based on convolutional neural networks that outperforms other competitive CS reconstruction algorithms. Besides, by incorporating BCS in our deep learning model, we were able to reconstruct images of any size above a certain smallest image size. In addition, we show that our model is capable of reconstructing images obtained from an SPI setup while being priorly trained on natural images, which can be vastly different from the SPI images. This opens up opportunity for the feasibility of pretrained deep learning models for CS reconstructions of images from various domain areas.
Automated Pavement Crack Segmentation Using Fully Convolutional U-Net with a Pretrained ResNet-34 Encoder
Jan 21, 2020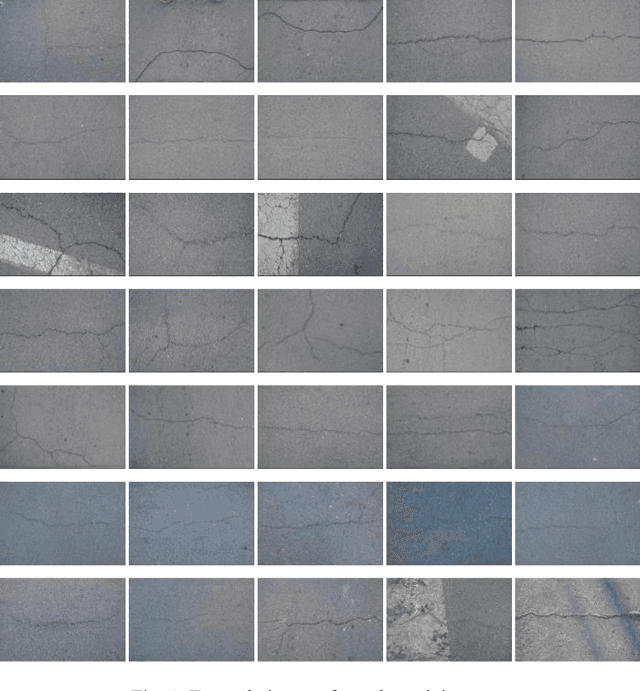
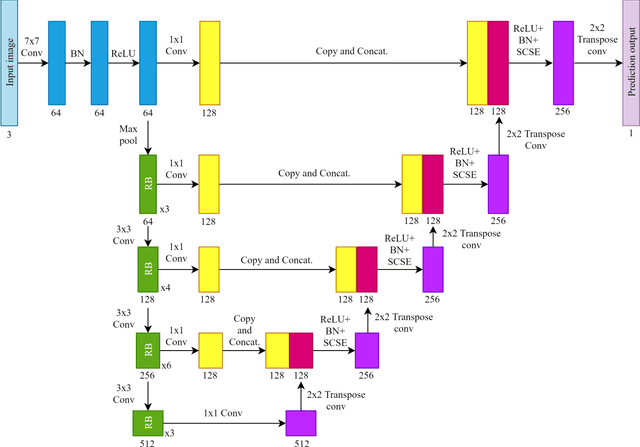
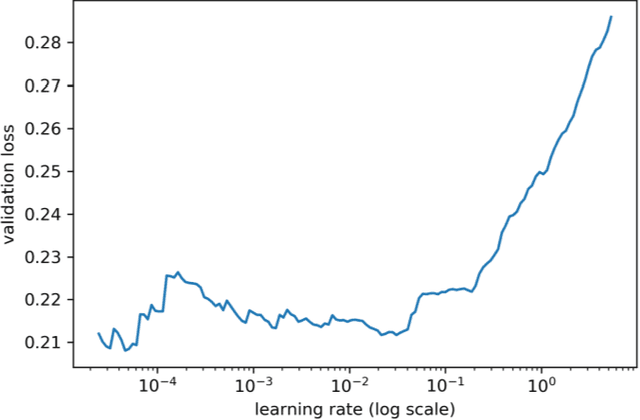
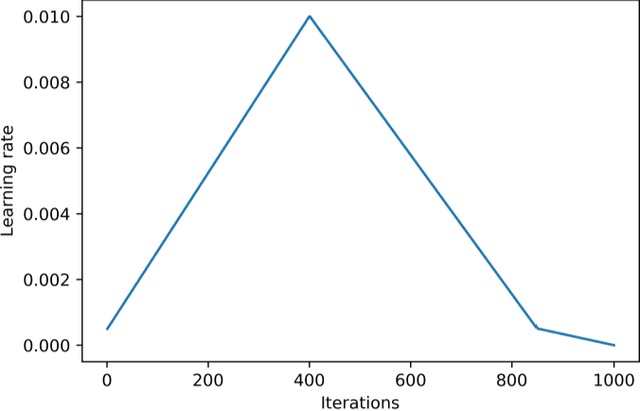
Automated pavement crack segmentation is a challenging task because of inherent irregular patterns and lighting conditions, in addition to the presence of noise in images. Conventional approaches require a substantial amount of feature engineering to differentiate crack regions from non-affected regions. In this paper, we propose a deep learning technique based on a convolutional neural network to perform segmentation tasks on pavement crack images. Our approach requires minimal feature engineering compared to other machine learning techniques. The proposed neural network architecture is a modified U-Net in which the encoder is replaced with a pretrained ResNet-34 network. To minimize the dice coefficient loss function, we optimize the parameters in the neural network by using an adaptive moment optimizer called AdamW. Additionally, we use a systematic method to find the optimum learning rate instead of doing parametric sweeps. We used a "one-cycle" training schedule based on cyclical learning rates to speed up the convergence. We evaluated the performance of our convolutional neural network on CFD, a pavement crack image dataset. Our method achieved an F1 score of about 96%. This is the best performance among all other algorithms tested on this dataset, outperforming the previous best method by a 1.7% margin.