 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Pavement Crack Segmentation Using Fully Convolutional U-Net with a Pretrained ResNet-34 Encoder
Paper and Code
Jan 21, 2020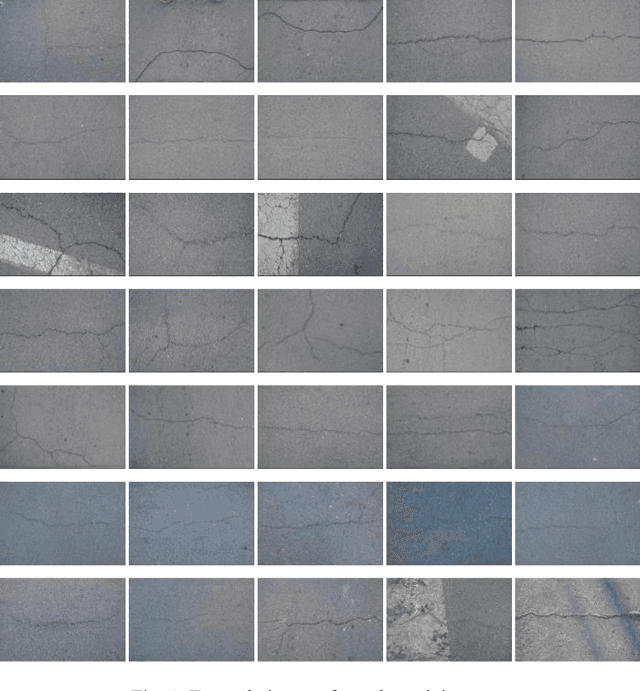
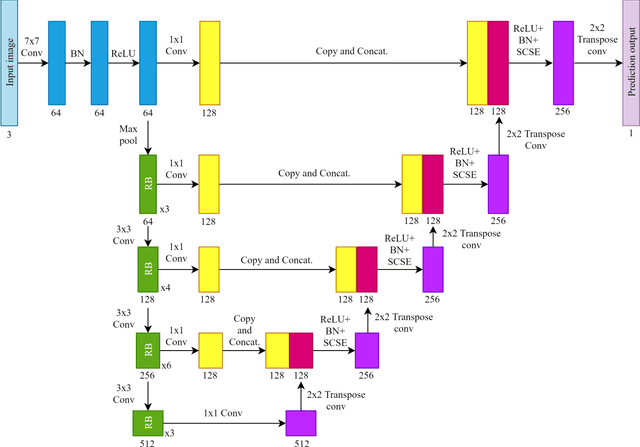
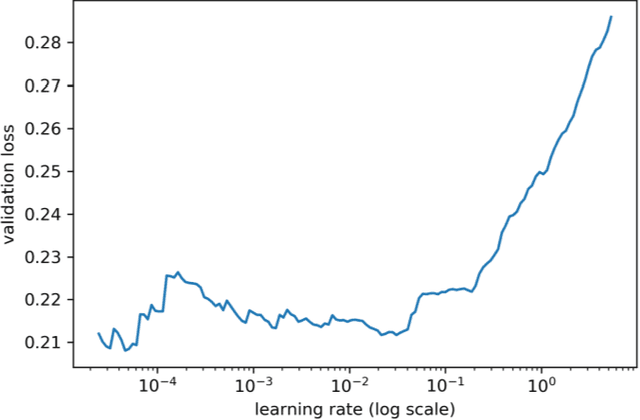
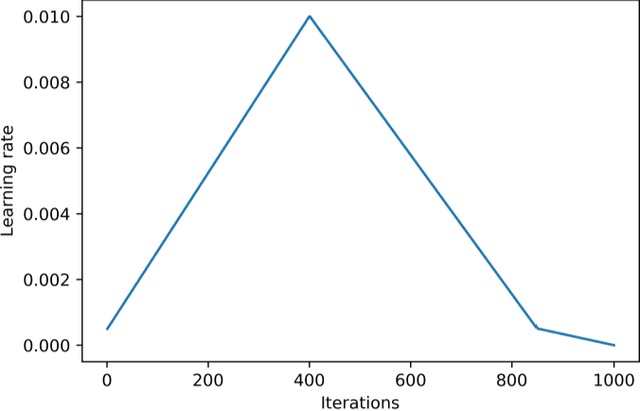
Automated pavement crack segmentation is a challenging task because of inherent irregular patterns and lighting conditions, in addition to the presence of noise in images. Conventional approaches require a substantial amount of feature engineering to differentiate crack regions from non-affected regions. In this paper, we propose a deep learning technique based on a convolutional neural network to perform segmentation tasks on pavement crack images. Our approach requires minimal feature engineering compared to other machine learning techniques. The proposed neural network architecture is a modified U-Net in which the encoder is replaced with a pretrained ResNet-34 network. To minimize the dice coefficient loss function, we optimize the parameters in the neural network by using an adaptive moment optimizer called AdamW. Additionally, we use a systematic method to find the optimum learning rate instead of doing parametric sweeps. We used a "one-cycle" training schedule based on cyclical learning rates to speed up the convergence. We evaluated the performance of our convolutional neural network on CFD, a pavement crack image dataset. Our method achieved an F1 score of about 96%. This is the best performance among all other algorithms tested on this dataset, outperforming the previous best method by a 1.7% margin.