 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRTGNN: A Novel Approach to Model Stochastic Traffic Dynamics
Feb 21, 2022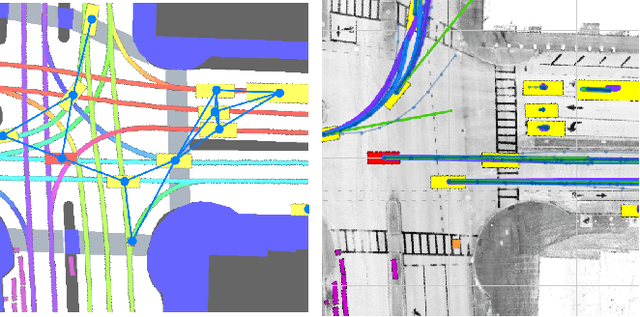
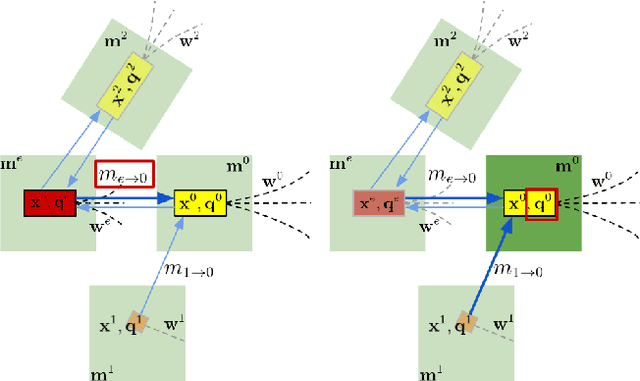
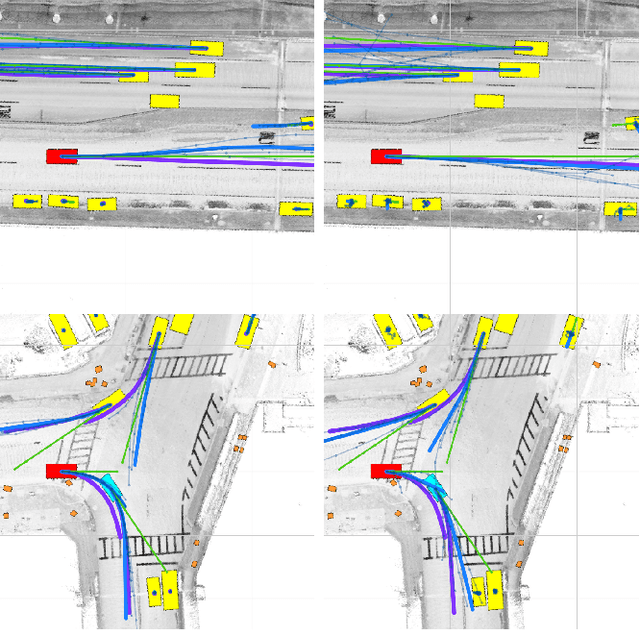

Modeling stochastic traffic dynamics is critical to developing self-driving cars. Because it is difficult to develop first principle models of cars driven by humans, there is great potential for using data driven approaches in developing traffic dynamical models. While there is extensive literature on this subject, previous works mainly address the prediction accuracy of data-driven models. Moreover, it is often difficult to apply these models to common planning frameworks since they fail to meet the assumptions therein. In this work, we propose a new stochastic traffic model, Recurrent Traffic Graph Neural Network (RTGNN), by enforcing additional structures on the model so that the proposed model can be seamlessly integrated with existing motion planning algorithms. RTGNN is a Markovian model and is able to infer future traffic states conditioned on the motion of the ego vehicle. Specifically, RTGNN uses a definition of the traffic state that includes the state of all players in a local region and is therefore able to make joint predictions for all agents of interest. Meanwhile, we explicitly model the hidden states of agents, "intentions," as part of the traffic state to reflect the inherent partial observability of traffic dynamics. The above mentioned properties are critical for integrating RTGNN with motion planning algorithms coupling prediction and decision making. Despite the additional structures, we show that RTGNN is able to achieve state-of-the-art accuracy through comparisons with other similar works.
Feedback Enhanced Motion Planning for Autonomous Vehicles
Jul 11, 2020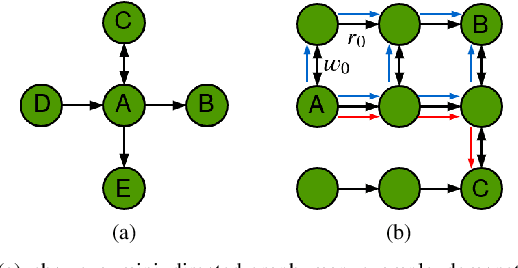

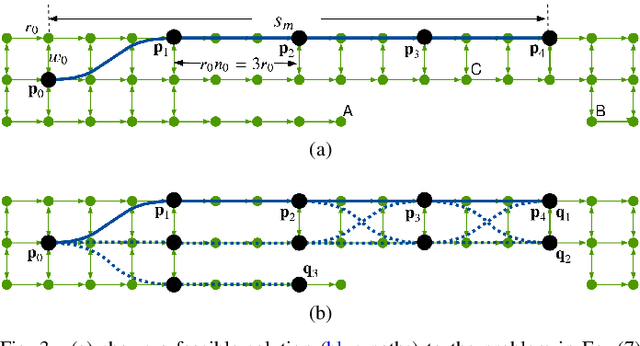
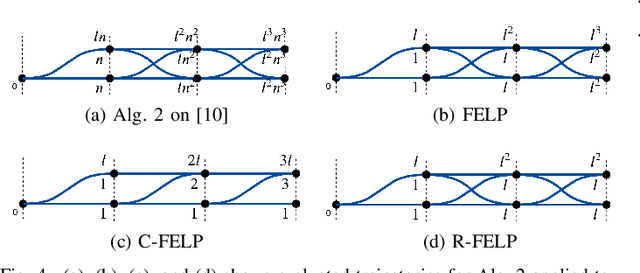
In this work, we address the motion planning problem for autonomous vehicles through a new lattice planning approach, called Feedback Enhanced Lattice Planner (FELP). Existing lattice planners have two major limitations, namely the high dimensionality of the lattice and the lack of modeling of agent vehicle behaviors. We propose to apply the Intelligent Driver Model (IDM) as a speed feedback policy to address both of these limitations. IDM both enables the responsive behavior of the agents, and uniquely determines the acceleration and speed profile of the ego vehicle on a given path. Therefore, only a spatial lattice is needed, while discretization of higher order dimensions is no longer required. Additionally, we propose a directed-graph map representation to support the implementation and execution of lattice planners. The map can reflect local geometric structure, embed the traffic rules adhering to the road, and is efficient to construct and update. We show that FELP is more efficient compared to other existing lattice planners through runtime complexity analysis, and we propose two variants of FELP to further reduce the complexity to polynomial time. We demonstrate the improvement by comparing FELP with an existing spatiotemporal lattice planner using simulations of a merging scenario and continuous highway traffic. We also study the performance of FELP under different traffic densities.