 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRTGNN: A Novel Approach to Model Stochastic Traffic Dynamics
Paper and Code
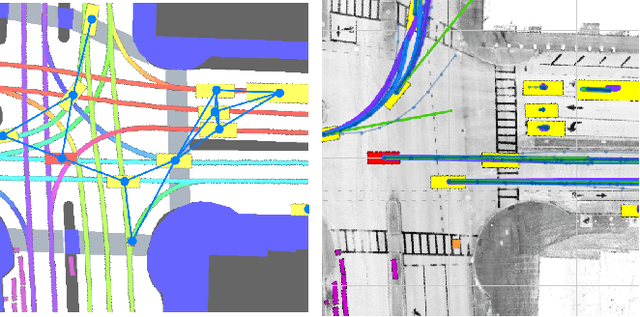
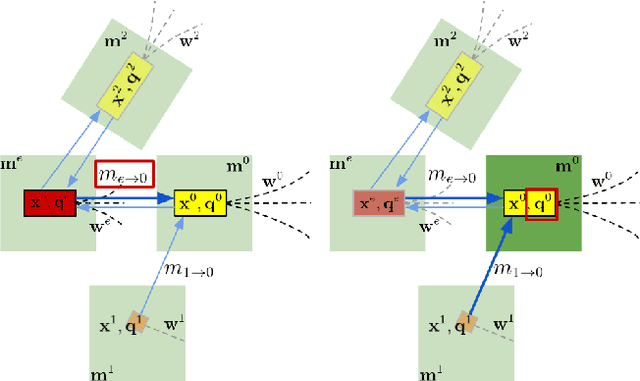
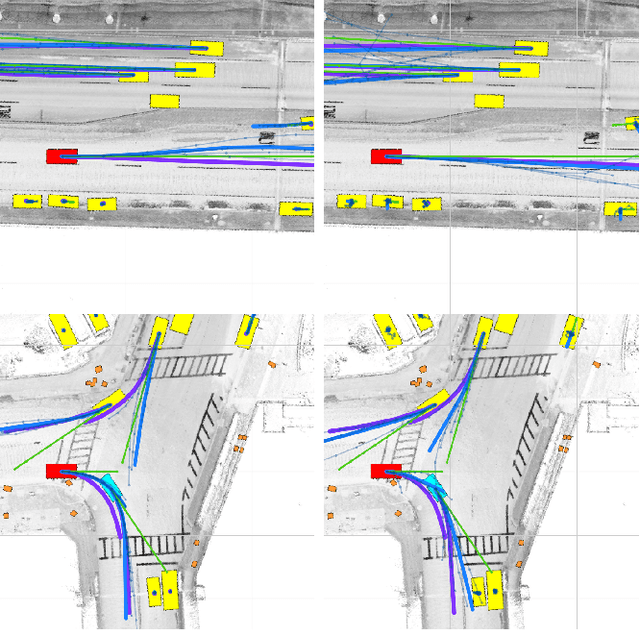

Modeling stochastic traffic dynamics is critical to developing self-driving cars. Because it is difficult to develop first principle models of cars driven by humans, there is great potential for using data driven approaches in developing traffic dynamical models. While there is extensive literature on this subject, previous works mainly address the prediction accuracy of data-driven models. Moreover, it is often difficult to apply these models to common planning frameworks since they fail to meet the assumptions therein. In this work, we propose a new stochastic traffic model, Recurrent Traffic Graph Neural Network (RTGNN), by enforcing additional structures on the model so that the proposed model can be seamlessly integrated with existing motion planning algorithms. RTGNN is a Markovian model and is able to infer future traffic states conditioned on the motion of the ego vehicle. Specifically, RTGNN uses a definition of the traffic state that includes the state of all players in a local region and is therefore able to make joint predictions for all agents of interest. Meanwhile, we explicitly model the hidden states of agents, "intentions," as part of the traffic state to reflect the inherent partial observability of traffic dynamics. The above mentioned properties are critical for integrating RTGNN with motion planning algorithms coupling prediction and decision making. Despite the additional structures, we show that RTGNN is able to achieve state-of-the-art accuracy through comparisons with other similar works.