 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoRL-MPPI: Enhancing MPPI With Learnable Behaviours For Efficient And Provably-Safe Multi-Robot Collision Avoidance
Nov 12, 2025Decentralized collision avoidance remains a core challenge for scalable multi-robot systems. One of the promising approaches to tackle this problem is Model Predictive Path Integral (MPPI) -- a framework that is naturally suited to handle any robot motion model and provides strong theoretical guarantees. Still, in practice MPPI-based controller may provide suboptimal trajectories as its performance relies heavily on uninformed random sampling. In this work, we introduce CoRL-MPPI, a novel fusion of Cooperative Reinforcement Learning and MPPI to address this limitation. We train an action policy (approximated as deep neural network) in simulation that learns local cooperative collision avoidance behaviors. This learned policy is then embedded into the MPPI framework to guide its sampling distribution, biasing it towards more intelligent and cooperative actions. Notably, CoRL-MPPI preserves all the theoretical guarantees of regular MPPI. We evaluate our approach in dense, dynamic simulation environments against state-of-the-art baselines, including ORCA, BVC, and a multi-agent MPPI implementation. Our results demonstrate that CoRL-MPPI significantly improves navigation efficiency (measured by success rate and makespan) and safety, enabling agile and robust multi-robot navigation.
Decentralized Uncertainty-Aware Multi-Agent Collision Avoidance With Model Predictive Path Integral
Jul 27, 2025Decentralized multi-agent navigation under uncertainty is a complex task that arises in numerous robotic applications. It requires collision avoidance strategies that account for both kinematic constraints, sensing and action execution noise. In this paper, we propose a novel approach that integrates the Model Predictive Path Integral (MPPI) with a probabilistic adaptation of Optimal Reciprocal Collision Avoidance. Our method ensures safe and efficient multi-agent navigation by incorporating probabilistic safety constraints directly into the MPPI sampling process via a Second-Order Cone Programming formulation. This approach enables agents to operate independently using local noisy observations while maintaining safety guarantees. We validate our algorithm through extensive simulations with differential-drive robots and benchmark it against state-of-the-art methods, including ORCA-DD and B-UAVC. Results demonstrate that our approach outperforms them while achieving high success rates, even in densely populated environments. Additionally, validation in the Gazebo simulator confirms its practical applicability to robotic platforms.
2.5D Mapping, Pathfinding and Path Following For Navigation Of A Differential Drive Robot In Uneven Terrain
Sep 15, 2022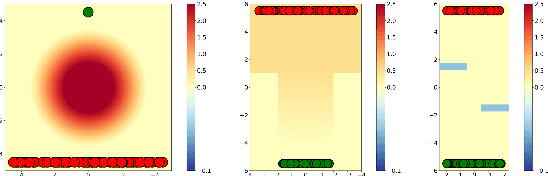



Safe navigation in uneven terrains is an important problem in robotic research. In this paper we propose a 2.5D navigation system which consists of elevation map building, path planning and local path following with obstacle avoidance. For local path following we use Model Predictive Path Integral (MPPI) control method. We propose novel cost-functions for MPPI in order to adapt it to elevation maps and motion through unevenness. We evaluate our system on multiple synthetic tests and in a simulated environment with different types of obstacles and rough surfaces.
A Combination of Theta*, ORCA and Push and Rotate for Multi-agent Navigation
Aug 03, 2020We study the problem of multi-agent navigation in static environments when no centralized controller is present. Each agent is controlled individually and relies on three algorithmic components to achieve its goal while avoiding collisions with the other agents and the obstacles: i) individual path planning which is done by Theta* algorithm; ii) collision avoidance while path following which is performed by ORCA* algorithm; iii) locally-confined multi-agent path planning done by Push and Rotate algorithm. The latter component is crucial to avoid deadlocks in confined areas, such as narrow passages or doors. We describe how the suggested components interact and form a coherent navigation pipeline. We carry out an extensive empirical evaluation of this pipeline in simulation. The obtained results clearly demonstrate that the number of occurring deadlocks significantly decreases enabling more agents to reach their goals compared to techniques that rely on collision-avoidance only and do not include multi-agent path planning component