Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2.5D Mapping, Pathfinding and Path Following For Navigation Of A Differential Drive Robot In Uneven Terrain
Paper and Code
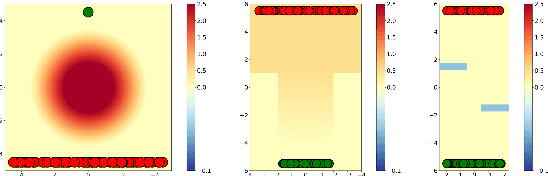



Safe navigation in uneven terrains is an important problem in robotic research. In this paper we propose a 2.5D navigation system which consists of elevation map building, path planning and local path following with obstacle avoidance. For local path following we use Model Predictive Path Integral (MPPI) control method. We propose novel cost-functions for MPPI in order to adapt it to elevation maps and motion through unevenness. We evaluate our system on multiple synthetic tests and in a simulated environment with different types of obstacles and rough surfaces.
* This is a preprint of the paper accepted to IFAC SYROCO'21/22. It
contains 6 pages, 4 figures and 2 tables. The supplementary video available
at https://youtu.be/LGhKaxnL8xA
View paper on