 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Multi-Target Detection-Tracking in Cognitive Massive MIMO Radar via POMCP
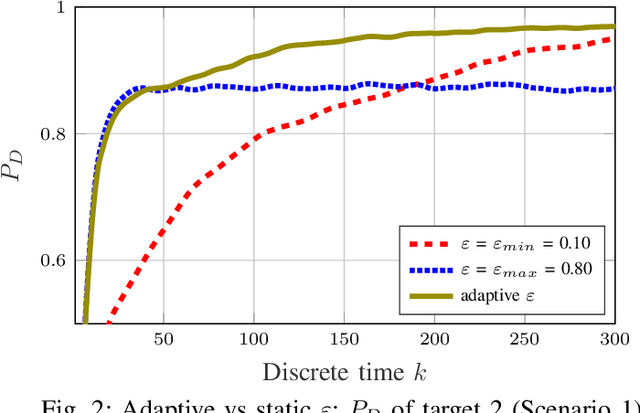
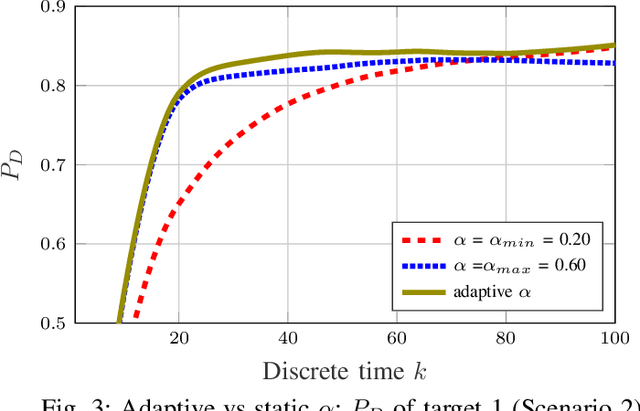
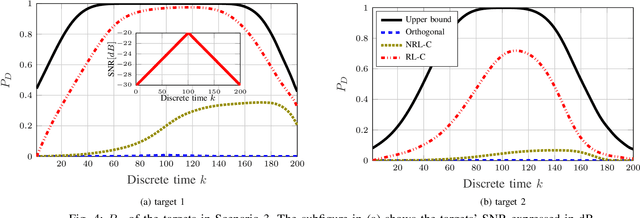
Jul 23, 2025This correspondence presents a power-aware cognitive radar framework for joint detection and tracking of multiple targets in a massive multiple-input multiple-output (MIMO) radar environment. Building on a previous single-target algorithm based on Partially Observable Monte Carlo Planning (POMCP), we extend it to the multi-target case by assigning each target an independent POMCP tree, enabling scalable and efficient planning. Departing from uniform power allocation-which is often suboptimal with varying signal-to-noise ratios (SNRs)-our approach predicts each target's future angular position and expected received power, based on its estimated range and radar cross-section (RCS). These predictions guide adaptive waveform design via a constrained optimization problem that allocates transmit energy to enhance the detectability of weaker or distant targets, while ensuring sufficient power for high-SNR targets. The reward function in the underlying partially observable Markov decision process (POMDP) is also modified to prioritize accurate spatial and power estimation. Simulations involving multiple targets with different SNRs confirm the effectiveness of our method. The proposed framework for the cognitive radar improves detection probability for low-SNR targets and achieves more accurate tracking compared to approaches using uniform or orthogonal waveforms. These results demonstrate the potential of the POMCP-based framework for adaptive, efficient multi-target radar systems.
POMDP-Driven Cognitive Massive MIMO Radar: Joint Target Detection-Tracking In Unknown Disturbances
Oct 23, 2024The joint detection and tracking of a moving target embedded in an unknown disturbance represents a key feature that motivates the development of the cognitive radar paradigm. Building upon recent advancements in robust target detection with multiple-input multiple-output (MIMO) radars, this work explores the application of a Partially Observable Markov Decision Process (POMDP) framework to enhance the tracking and detection tasks in a statistically unknown environment. In the POMDP setup, the radar system is considered as an intelligent agent that continuously senses the surrounding environment, optimizing its actions to maximize the probability of detection $(P_D)$ and improve the target position and velocity estimation, all this while keeping a constant probability of false alarm $(P_{FA})$. The proposed approach employs an online algorithm that does not require any apriori knowledge of the noise statistics, and it relies on a much more general observation model than the traditional range-azimuth-elevation model employed by conventional tracking algorithms. Simulation results clearly show substantial performance improvement of the POMDP-based algorithm compared to the State-Action-Reward-State-Action (SARSA)-based one that has been recently investigated in the context of massive MIMO (MMIMO) radar systems.
Enhancement of a state-of-the-art RL-based detection algorithm for Massive MIMO radars
Dec 05, 2021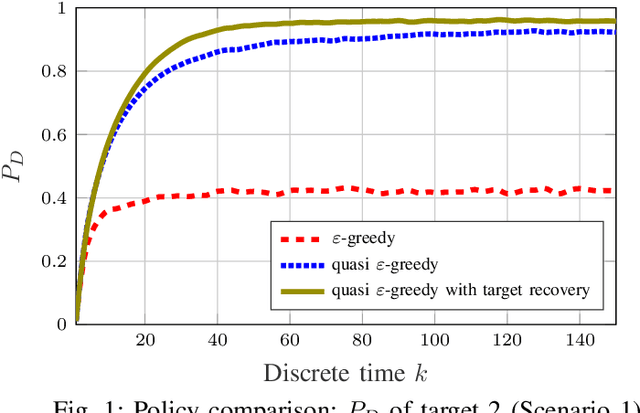
In the present work, a reinforcement learning (RL) based adaptive algorithm to optimise the transmit beampattern for a colocated massive MIMO radar is presented. Under the massive MIMO regime, a robust Wald type detector, able to guarantee certain detection performances under a wide range of practical disturbance models, has been recently proposed. Furthermore, an RL/cognitive methodology has been exploited to improve the detection performance by learning and interacting with the surrounding unknown environment. Building upon previous findings, we develop here a fully adaptive and data driven scheme for the selection of the hyper-parameters involved in the RL algorithm. Such an adaptive selection makes the Wald RL based detector independent of any ad hoc, and potentially suboptimal, manual tuning of the hyper-parameters. Simulation results show the effectiveness of the proposed scheme in harsh scenarios with strong clutter and low SNR values.
Joint Estimation of Location and Scatter in Complex Elliptical Distributions: A robust semiparametric and computationally efficient $R$-estimator of the shape matrix
Jan 26, 2021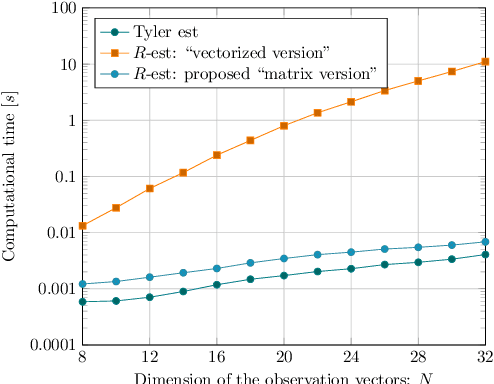
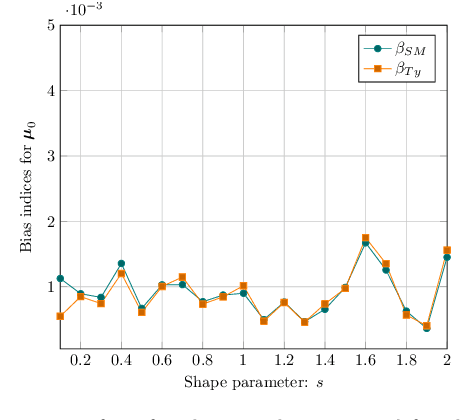
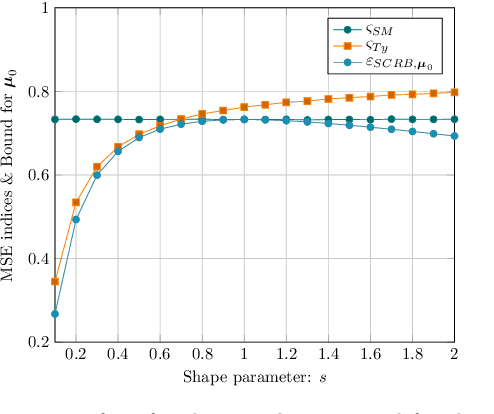
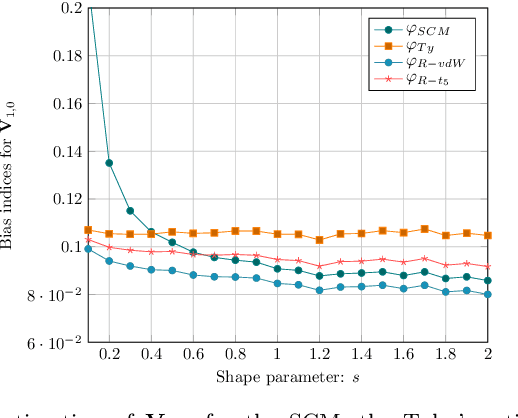
The joint estimation of the location vector and the shape matrix of a set of independent and identically Complex Elliptically Symmetric (CES) distributed observations is investigated from both the theoretical and computational viewpoints. This joint estimation problem is framed in the original context of semiparametric models allowing us to handle the (generally unknown) density generator as an \textit{infinite-dimensional} nuisance parameter. In the first part of the paper, a computationally efficient and memory saving implementation of the robust and semiparmaetric efficient $R$-estimator for shape matrices is derived. Building upon this result, in the second part, a joint estimator, relying on the Tyler's $M$-estimator of location and on the $R$-estimator of shape matrix, is proposed and its Mean Squared Error (MSE) performance compared with the Semiparametric Cram\'{e}r-Rao Bound (CSCRB).
Reinforcement Learning based Beamforming for Massive MIMO Radar Multi-target Detection
May 10, 2020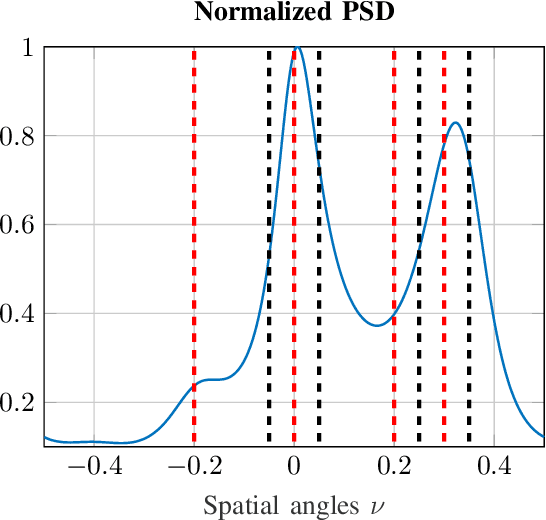
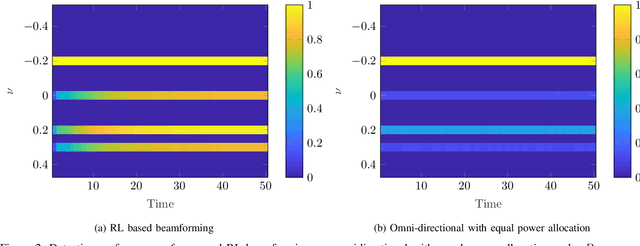
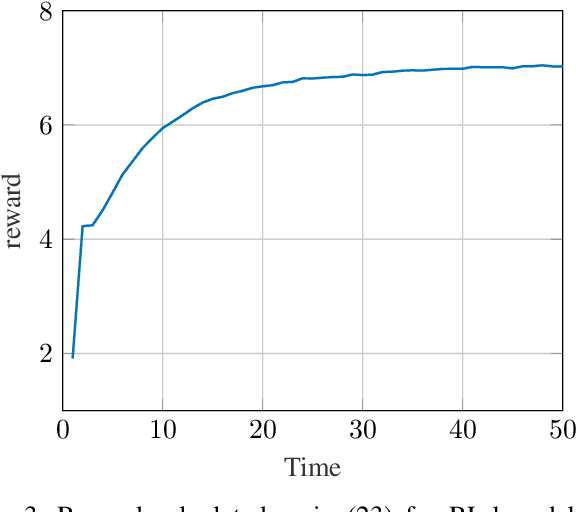
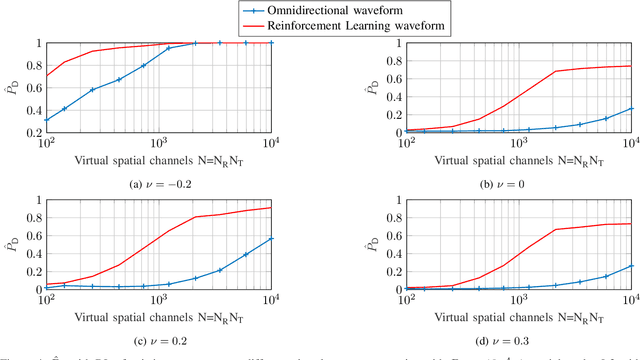
This paper considers the problem of multi-target detection for massive multiple input multiple output (MMIMO) cognitive radar (CR). The concept of CR is based on the perception-action cycle that senses and intelligently adapts to the dynamic environment in order to optimally satisfy a specific mission. However, this usually requires a priori knowledge of the environmental model, which is not available in most cases. We propose a reinforcement learning (RL) based algorithm for cognitive beamforming in the presence of unknown disturbance statistics. The radar acts as an agent which continuously senses the unknown environment (i.e., targets and disturbance). Consequently, it optimizes the beamformers through tailoring the beampattern based on the acquired information. Furthermore, we propose a solution to the beamforming optimization problem with less complexity than the existing methods. Numerical simulations are performed to assess the performance of the proposed RL-based algorithm in both stationary and dynamic environments. The RL based beamforming is compared to the conventional omnidirectional approach with equal power allocation. As highlighted by the proposed numerical results, our RL-based beamformer greatly outperforms the omnidirectional one in terms of target detection performance. The performance improvement is even more remarkable under environmentally harsh conditions such as low SNR, heavy-tailed disturbance and rapidly changing scenarios.