 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Schema-aware Logic Reformulation for Graph Reachability
Oct 03, 2024
Graph reachability is the task of understanding whether two distinct points in a graph are interconnected by arcs to which in general a semantic is attached. Reachability has plenty of applications, ranging from motion planning to routing. Improving reachability requires structural knowledge of relations so as to avoid the complexity of traditional depth-first and breadth-first strategies, implemented in logic languages. In some contexts, graphs are enriched with their schema definitions establishing domain and range for every arc. The introduction of a schema-aware formalization for guiding the search may result in a sensitive improvement by cutting out unuseful paths and prioritising those that, in principle, reach the target earlier. In this work, we propose a strategy to automatically exclude and sort certain graph paths by exploiting the higher-level conceptualization of instances. The aim is to obtain a new first-order logic reformulation of the graph reachability scenario, capable of improving the traditional algorithms in terms of time, space requirements, and number of backtracks. The experiments exhibit the expected advantages of the approach in reducing the number of backtracks during the search strategy, resulting in saving time and space as well.
The World Literature Knowledge Graph
Jul 31, 2023



Digital media have enabled the access to unprecedented literary knowledge. Authors, readers, and scholars are now able to discover and share an increasing amount of information about books and their authors. However, these sources of knowledge are fragmented and do not adequately represent non-Western writers and their works. In this paper we present The World Literature Knowledge Graph, a semantic resource containing 194,346 writers and 965,210 works, specifically designed for exploring facts about literary works and authors from different parts of the world. The knowledge graph integrates information about the reception of literary works gathered from 3 different communities of readers, aligned according to a single semantic model. The resource is accessible through an online visualization platform, which can be found at the following URL: https://literaturegraph.di.unito.it/. This platform has been rigorously tested and validated by $3$ distinct categories of experts who have found it to be highly beneficial for their respective work domains. These categories include teachers, researchers in the humanities, and professionals in the publishing industry. The feedback received from these experts confirms that they can effectively utilize the platform to enhance their work processes and achieve valuable outcomes.
GRASP and path-relinking for Coalition Structure Generation
Mar 09, 2011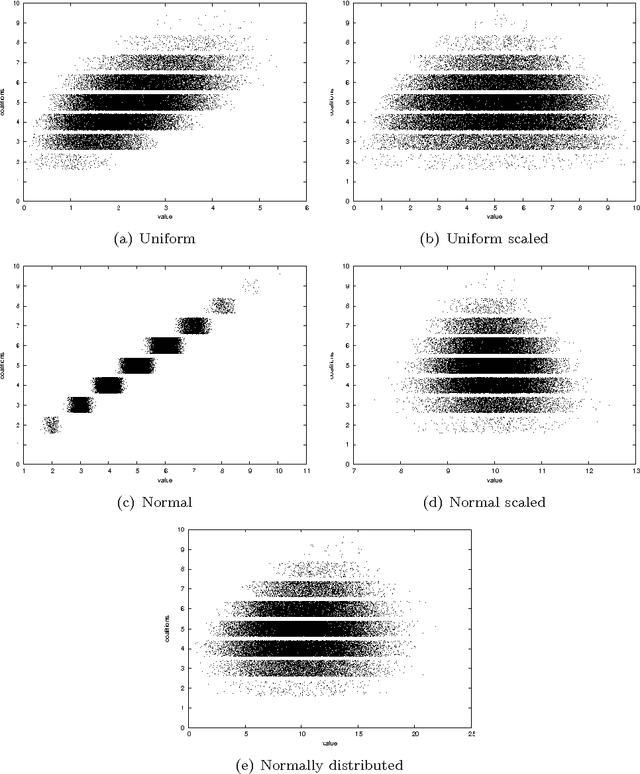
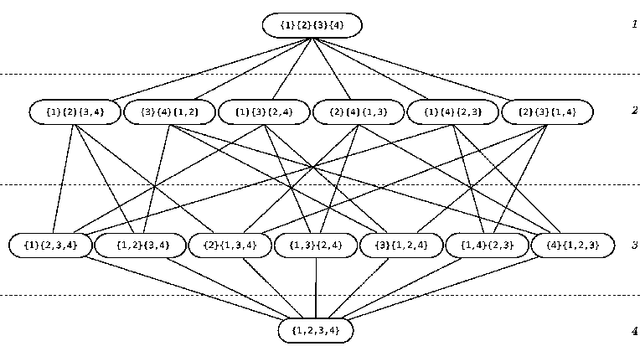

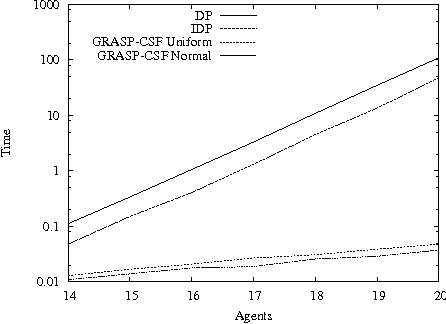
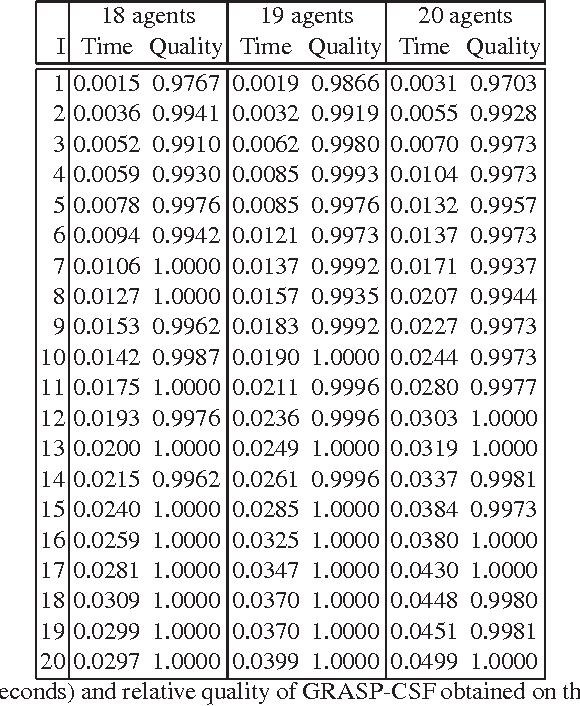
In Artificial Intelligence with Coalition Structure Generation (CSG) one refers to those cooperative complex problems that require to find an optimal partition, maximising a social welfare, of a set of entities involved in a system into exhaustive and disjoint coalitions. The solution of the CSG problem finds applications in many fields such as Machine Learning (covering machines, clustering), Data Mining (decision tree, discretization), Graph Theory, Natural Language Processing (aggregation), Semantic Web (service composition), and Bioinformatics. The problem of finding the optimal coalition structure is NP-complete. In this paper we present a greedy adaptive search procedure (GRASP) with path-relinking to efficiently search the space of coalition structures. Experiments and comparisons to other algorithms prove the validity of the proposed method in solving this hard combinatorial problem.
Analysing the behaviour of robot teams through relational sequential pattern mining
Oct 29, 2010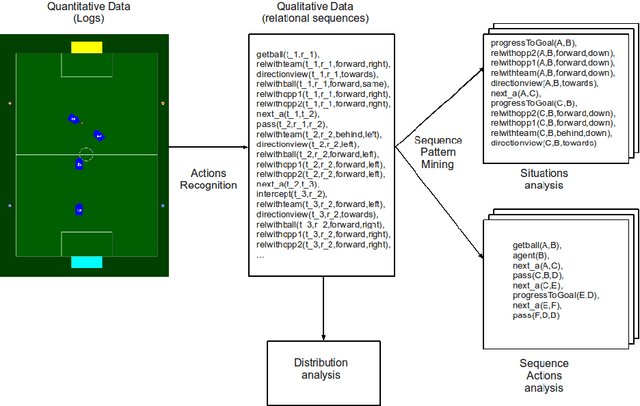
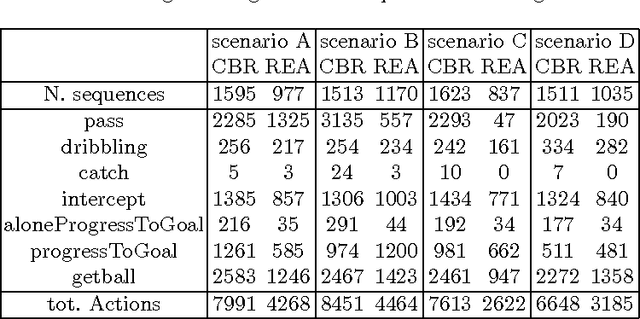

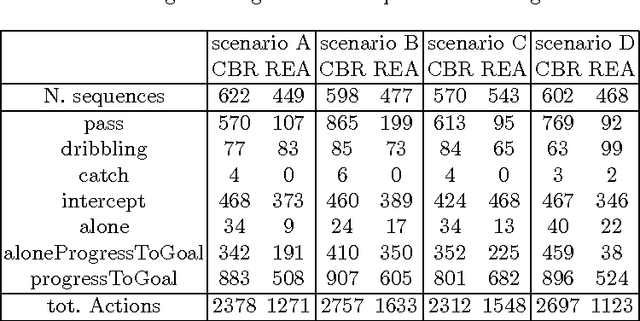
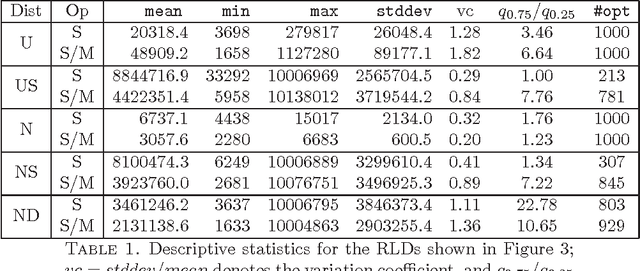
This report outlines the use of a relational representation in a Multi-Agent domain to model the behaviour of the whole system. A desired property in this systems is the ability of the team members to work together to achieve a common goal in a cooperative manner. The aim is to define a systematic method to verify the effective collaboration among the members of a team and comparing the different multi-agent behaviours. Using external observations of a Multi-Agent System to analyse, model, recognize agent behaviour could be very useful to direct team actions. In particular, this report focuses on the challenge of autonomous unsupervised sequential learning of the team's behaviour from observations. Our approach allows to learn a symbolic sequence (a relational representation) to translate raw multi-agent, multi-variate observations of a dynamic, complex environment, into a set of sequential behaviours that are characteristic of the team in question, represented by a set of sequences expressed in first-order logic atoms. We propose to use a relational learning algorithm to mine meaningful frequent patterns among the relational sequences to characterise team behaviours. We compared the performance of two teams in the RoboCup four-legged league environment, that have a very different approach to the game. One uses a Case Based Reasoning approach, the other uses a pure reactive behaviour.
Feature Construction for Relational Sequence Learning
Jun 27, 2010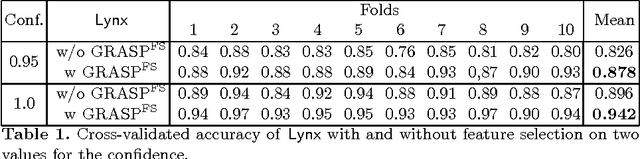
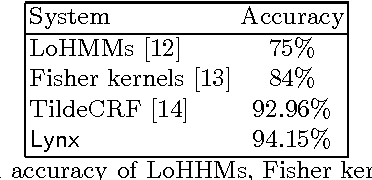
We tackle the problem of multi-class relational sequence learning using relevant patterns discovered from a set of labelled sequences. To deal with this problem, firstly each relational sequence is mapped into a feature vector using the result of a feature construction method. Since, the efficacy of sequence learning algorithms strongly depends on the features used to represent the sequences, the second step is to find an optimal subset of the constructed features leading to high classification accuracy. This feature selection task has been solved adopting a wrapper approach that uses a stochastic local search algorithm embedding a naive Bayes classifier. The performance of the proposed method applied to a real-world dataset shows an improvement when compared to other established methods, such as hidden Markov models, Fisher kernels and conditional random fields for relational sequences.
GRASP for the Coalition Structure Formation Problem
Apr 16, 2010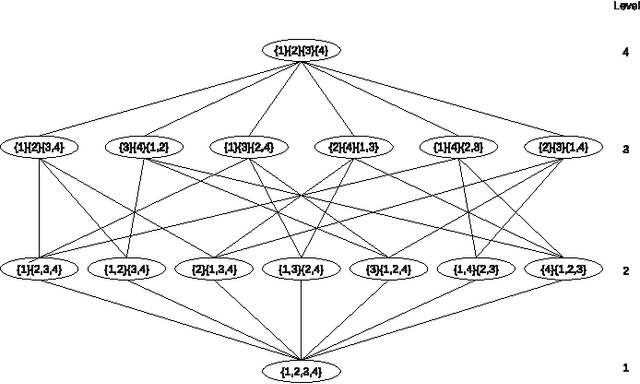
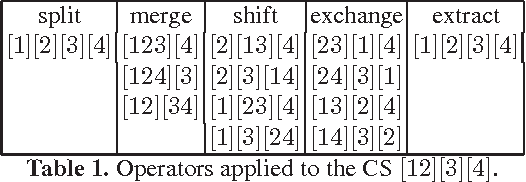
The coalition structure formation problem represents an active research area in multi-agent systems. A coalition structure is defined as a partition of the agents involved in a system into disjoint coalitions. The problem of finding the optimal coalition structure is NP-complete. In order to find the optimal solution in a combinatorial optimization problem it is theoretically possible to enumerate the solutions and evaluate each. But this approach is infeasible since the number of solutions often grows exponentially with the size of the problem. In this paper we present a greedy adaptive search procedure (GRASP) to efficiently search the space of coalition structures in order to find an optimal one. Experiments and comparisons to other algorithms prove the validity of the proposed method in solving this hard combinatorial problem.