 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUltra-low Power Deep Learning-based Monocular Relative Localization Onboard Nano-quadrotors
Mar 03, 2023



Precise relative localization is a crucial functional block for swarm robotics. This work presents a novel autonomous end-to-end system that addresses the monocular relative localization, through deep neural networks (DNNs), of two peer nano-drones, i.e., sub-40g of weight and sub-100mW processing power. To cope with the ultra-constrained nano-drone platform, we propose a vertically-integrated framework, from the dataset collection to the final in-field deployment, including dataset augmentation, quantization, and system optimizations. Experimental results show that our DNN can precisely localize a 10cm-size target nano-drone by employing only low-resolution monochrome images, up to ~2m distance. On a disjoint testing dataset our model yields a mean R2 score of 0.42 and a root mean square error of 18cm, which results in a mean in-field prediction error of 15cm and in a closed-loop control error of 17cm, over a ~60s-flight test. Ultimately, the proposed system improves the State-of-the-Art by showing long-endurance tracking performance (up to 2min continuous tracking), generalization capabilities being deployed in a never-seen-before environment, and requiring a minimal power consumption of 95mW for an onboard real-time inference-rate of 48Hz.
Vision-State Fusion: Improving Deep Neural Networks for Autonomous Robotics
Jun 13, 2022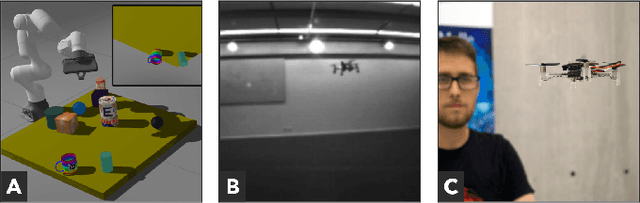
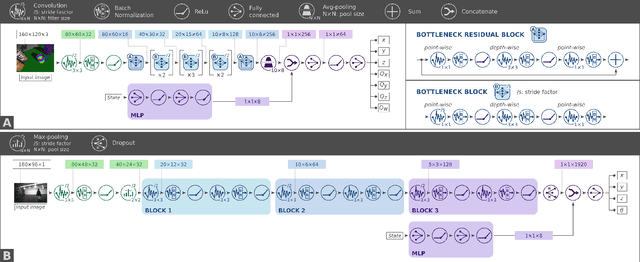
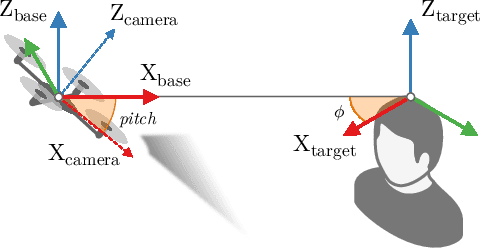
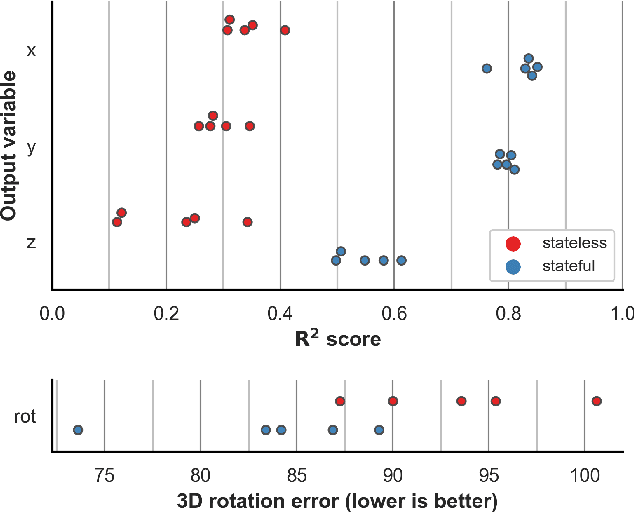
Vision-based perception tasks fulfill a paramount role in robotics, facilitating solutions to many challenging scenarios, such as acrobatics maneuvers of autonomous unmanned aerial vehicles (UAVs) and robot-assisted high precision surgery. Most control-oriented and egocentric perception problems are commonly solved by taking advantage of the robot state estimation as an auxiliary input, particularly when artificial intelligence comes into the picture. In this work, we propose to apply a similar approach for the first time - to the best of our knowledge - to allocentric perception tasks, where the target variables refer to an external subject. We prove how our general and intuitive methodology improves the regression performance of deep convolutional neural networks (CNNs) with ambiguous problems such as the allocentric 3D pose estimation. By analyzing three highly-different use cases, spanning from grasping with a robotic arm to following a human subject with a pocket-sized UAV, our results consistently improve the R2 metric up to +0.514 compared to their stateless baselines. Finally, we validate the in-field performance of a closed-loop autonomous pocket-sized UAV in the human pose estimation task. Our results show a significant reduction, i.e., 24% on average, on the mean absolute error of our stateful CNN.