 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEV-Locator: An End-to-end Visual Semantic Localization Network Using Multi-View Images
Nov 27, 2022Accurate localization ability is fundamental in autonomous driving. Traditional visual localization frameworks approach the semantic map-matching problem with geometric models, which rely on complex parameter tuning and thus hinder large-scale deployment. In this paper, we propose BEV-Locator: an end-to-end visual semantic localization neural network using multi-view camera images. Specifically, a visual BEV (Birds-Eye-View) encoder extracts and flattens the multi-view images into BEV space. While the semantic map features are structurally embedded as map queries sequence. Then a cross-model transformer associates the BEV features and semantic map queries. The localization information of ego-car is recursively queried out by cross-attention modules. Finally, the ego pose can be inferred by decoding the transformer outputs. We evaluate the proposed method in large-scale nuScenes and Qcraft datasets. The experimental results show that the BEV-locator is capable to estimate the vehicle poses under versatile scenarios, which effectively associates the cross-model information from multi-view images and global semantic maps. The experiments report satisfactory accuracy with mean absolute errors of 0.052m, 0.135m and 0.251$^\circ$ in lateral, longitudinal translation and heading angle degree.
A Critical Analysis of Image-based Camera Pose Estimation Techniques
Jan 15, 2022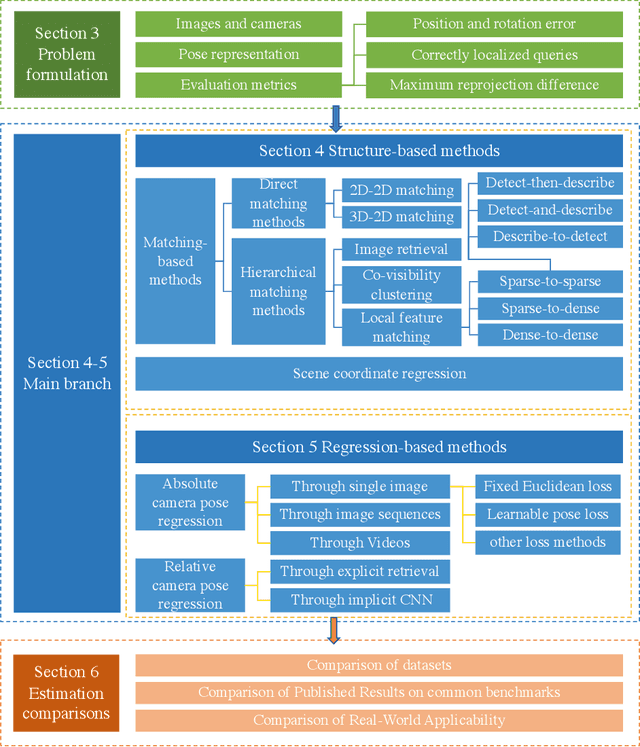
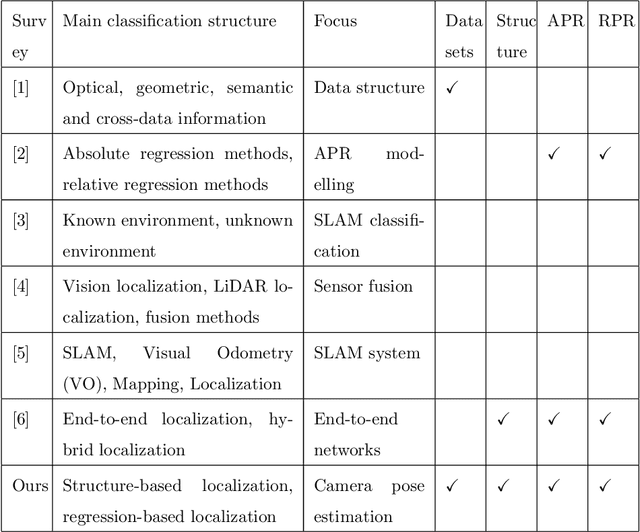
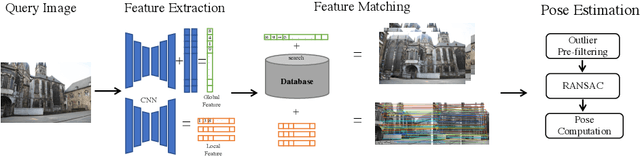
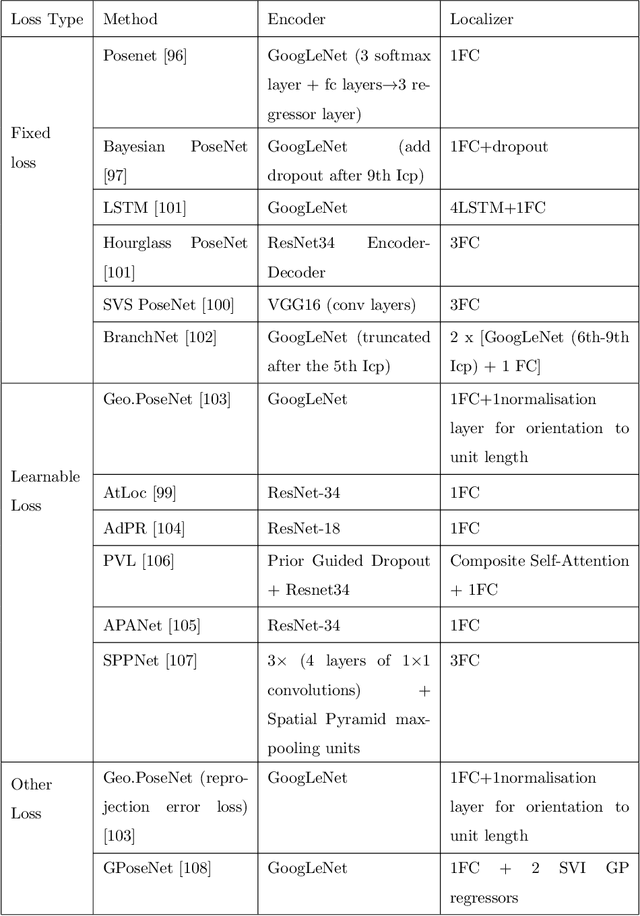
Camera, and associated with its objects within the field of view, localization could benefit many computer vision fields, such as autonomous driving, robot navigation, and augmented reality (AR). In this survey, we first introduce specific application areas and the evaluation metrics for camera localization pose according to different sub-tasks (learning-based 2D-2D task, feature-based 2D-3D task, and 3D-3D task). Then, we review common methods for structure-based camera pose estimation approaches, absolute pose regression and relative pose regression approaches by critically modelling the methods to inspire further improvements in their algorithms such as loss functions, neural network structures. Furthermore, we summarise what are the popular datasets used for camera localization and compare the quantitative and qualitative results of these methods with detailed performance metrics. Finally, we discuss future research possibilities and applications.