 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable physical source-to-field inference with hypernetworks
May 07, 2024We present a generative model that amortises computation for the field around e.g. gravitational or magnetic sources. Exact numerical calculation has either computational complexity $\mathcal{O}(M\times{}N)$ in the number of sources and field evaluation points, or requires a fixed evaluation grid to exploit fast Fourier transforms. Using an architecture where a hypernetwork produces an implicit representation of the field around a source collection, our model instead performs as $\mathcal{O}(M + N)$, achieves accuracy of $\sim\!4\%-6\%$, and allows evaluation at arbitrary locations for arbitrary numbers of sources, greatly increasing the speed of e.g. physics simulations. We also examine a model relating to the physical properties of the output field and develop two-dimensional examples to demonstrate its application. The code for these models and experiments is available at https://github.com/cmt-dtu-energy/hypermagnetics.
Magnetic Field Prediction Using Generative Adversarial Networks
Mar 14, 2022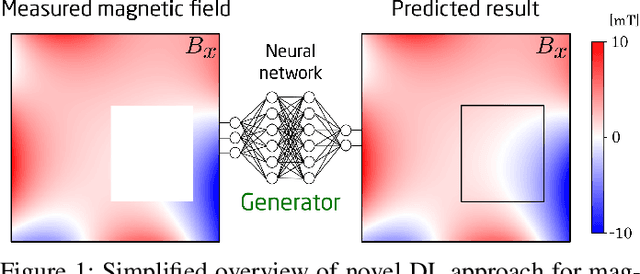
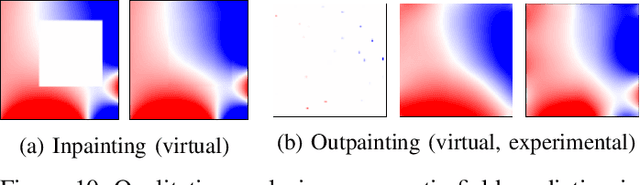
Plenty of scientific and real-world applications are built on magnetic fields and their characteristics. To retrieve the valuable magnetic field information in high resolution, extensive field measurements are required, which are either time-consuming to conduct or even not feasible due to physical constraints. To alleviate this problem, we predict magnetic field values at a random point in space from a few point measurements by using a generative adversarial network (GAN) structure. The deep learning (DL) architecture consists of two neural networks: a generator, which predicts missing field values of a given magnetic field, and a critic, which is trained to calculate the statistical distance between real and generated magnetic field distributions. By minimizing this statistical distance, a reconstruction loss as well as physical losses, our trained generator has learned to predict the missing field values with a median reconstruction test error of 5.14%, when a single coherent region of field points is missing, and 5.86%, when only a few point measurements in space are available and the field measurements around are predicted. We verify the results on an experimentally validated field.
Addressing Inherent Uncertainty: Risk-Sensitive Behavior Generation for Automated Driving using Distributional Reinforcement Learning
Feb 05, 2021


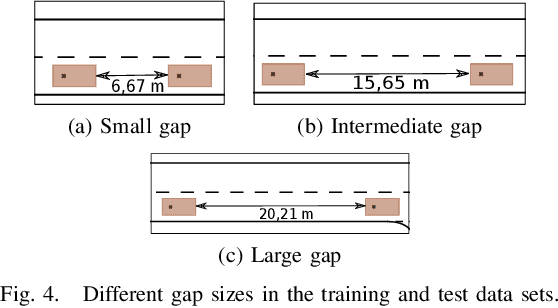
For highly automated driving above SAE level~3, behavior generation algorithms must reliably consider the inherent uncertainties of the traffic environment, e.g. arising from the variety of human driving styles. Such uncertainties can generate ambiguous decisions, requiring the algorithm to appropriately balance low-probability hazardous events, e.g. collisions, and high-probability beneficial events, e.g. quickly crossing the intersection. State-of-the-art behavior generation algorithms lack a distributional treatment of decision outcome. This impedes a proper risk evaluation in ambiguous situations, often encouraging either unsafe or conservative behavior. Thus, we propose a two-step approach for risk-sensitive behavior generation combining offline distribution learning with online risk assessment. Specifically, we first learn an optimal policy in an uncertain environment with Deep Distributional Reinforcement Learning. During execution, the optimal risk-sensitive action is selected by applying established risk criteria, such as the Conditional Value at Risk, to the learned state-action return distributions. In intersection crossing scenarios, we evaluate different risk criteria and demonstrate that our approach increases safety, while maintaining an active driving style. Our approach shall encourage further studies about the benefits of risk-sensitive approaches for self-driving vehicles.