 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Shielding for Reinforcement Learning in Black-Box Environments
Jul 27, 2022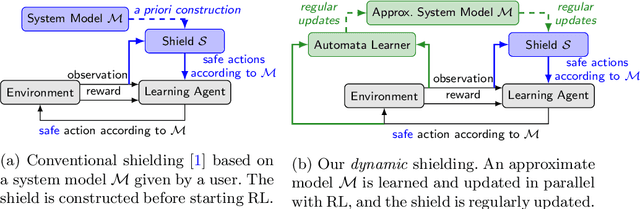

It is challenging to use reinforcement learning (RL) in cyber-physical systems due to the lack of safety guarantees during learning. Although there have been various proposals to reduce undesired behaviors during learning, most of these techniques require prior system knowledge, and their applicability is limited. This paper aims to reduce undesired behaviors during learning without requiring any prior system knowledge. We propose dynamic shielding: an extension of a model-based safe RL technique called shielding using automata learning. The dynamic shielding technique constructs an approximate system model in parallel with RL using a variant of the RPNI algorithm and suppresses undesired explorations due to the shield constructed from the learned model. Through this combination, potentially unsafe actions can be foreseen before the agent experiences them. Experiments show that our dynamic shield significantly decreases the number of undesired events during training.
Handling Noise in Search-Based Scenario Generation for Autonomous Driving Systems
Sep 16, 2021
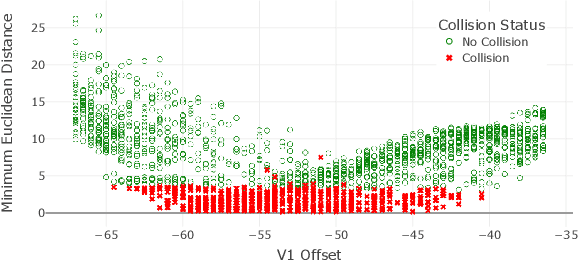
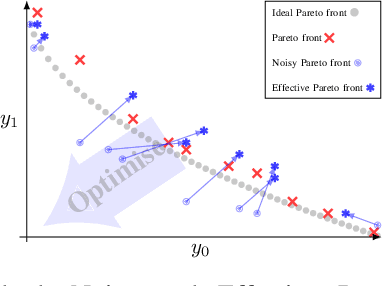
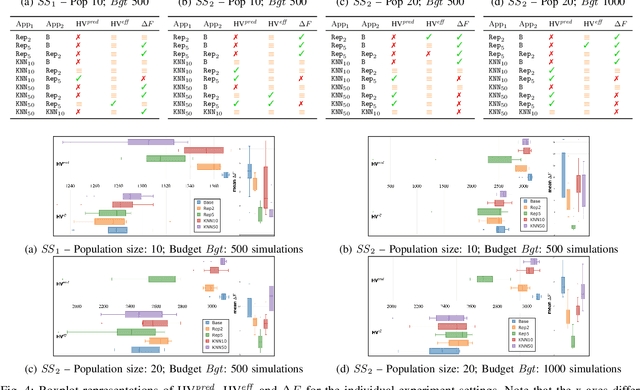
This paper presents the first evaluation of k-nearest neighbours-Averaging (kNN-Avg) on a real-world case study. kNN-Avg is a novel technique that tackles the challenges of noisy multi-objective optimisation (MOO). Existing studies suggest the use of repetition to overcome noise. In contrast, kNN-Avg approximates these repetitions and exploits previous executions, thereby avoiding the cost of re-running. We use kNN-Avg for the scenario generation of a real-world autonomous driving system (ADS) and show that it is better than the noisy baseline. Furthermore, we compare it to the repetition-method and outline indicators as to which approach to choose in which situations.