 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Shielding for Reinforcement Learning in Black-Box Environments
Jul 27, 2022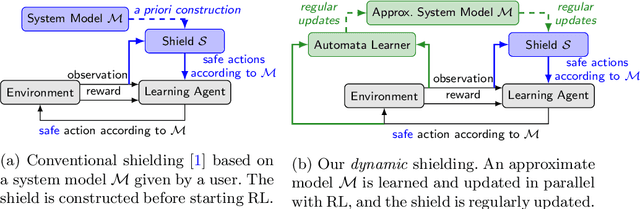

It is challenging to use reinforcement learning (RL) in cyber-physical systems due to the lack of safety guarantees during learning. Although there have been various proposals to reduce undesired behaviors during learning, most of these techniques require prior system knowledge, and their applicability is limited. This paper aims to reduce undesired behaviors during learning without requiring any prior system knowledge. We propose dynamic shielding: an extension of a model-based safe RL technique called shielding using automata learning. The dynamic shielding technique constructs an approximate system model in parallel with RL using a variant of the RPNI algorithm and suppresses undesired explorations due to the shield constructed from the learned model. Through this combination, potentially unsafe actions can be foreseen before the agent experiences them. Experiments show that our dynamic shield significantly decreases the number of undesired events during training.
Goal-Aware RSS for Complex Scenarios via Program Logic
Jul 06, 2022
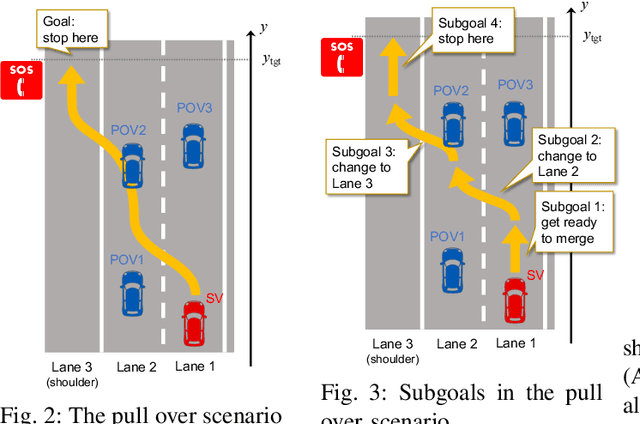
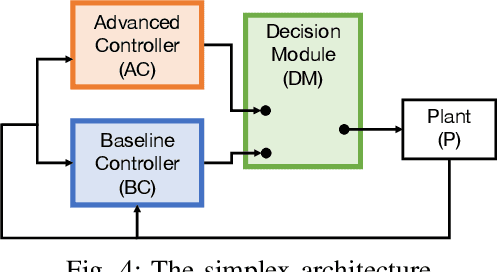
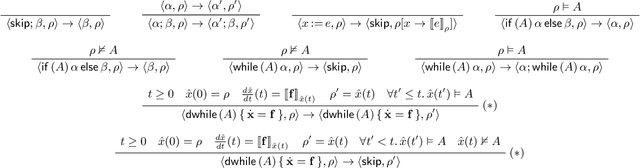
We introduce a goal-aware extension of responsibility-sensitive safety (RSS), a recent methodology for rule-based safety guarantee for automated driving systems (ADS). Making RSS rules guarantee goal achievement -- in addition to collision avoidance as in the original RSS -- requires complex planning over long sequences of manoeuvres. To deal with the complexity, we introduce a compositional reasoning framework based on program logic, in which one can systematically develop RSS rules for smaller subscenarios and combine them to obtain RSS rules for bigger scenarios. As the basis of the framework, we introduce a program logic dFHL that accommodates continuous dynamics and safety conditions. Our framework presents a dFHL-based workflow for deriving goal-aware RSS rules; we discuss its software support, too. We conducted experimental evaluation using RSS rules in a safety architecture. Its results show that goal-aware RSS is indeed effective in realising both collision avoidance and goal achievement.