 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFormal Verification of Safety Architectures for Automated Driving
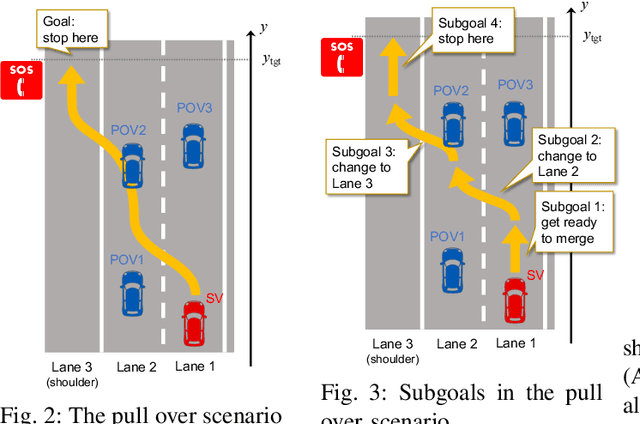
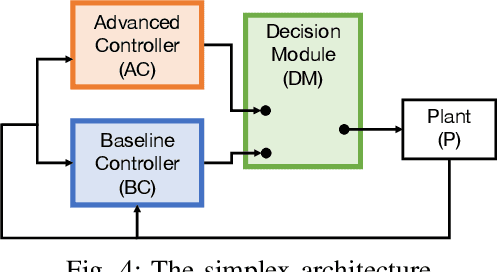
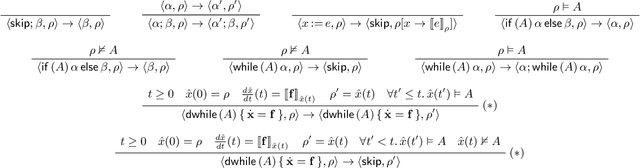
Aug 20, 2023Safety architectures play a crucial role in the safety assurance of automated driving vehicles (ADVs). They can be used as safety envelopes of black-box ADV controllers, and for graceful degradation from one ODD to another. Building on our previous work on the formalization of responsibility-sensitive safety (RSS), we introduce a novel program logic that accommodates assume-guarantee reasoning and fallback-like constructs. This allows us to formally define and prove the safety of existing and novel safety architectures. We apply the logic to a pull over scenario and experimentally evaluate the resulting safety architecture.
* In proceedings of 2023 IEEE Intelligent Vehicles Symposium (IV), 8 pages, 5 figures
Formal Verification of Intersection Safety for Automated Driving
Aug 13, 2023


We build on our recent work on formalization of responsibility-sensitive safety (RSS) and present the first formal framework that enables mathematical proofs of the safety of control strategies in intersection scenarios. Intersection scenarios are challenging due to the complex interaction between vehicles; to cope with it, we extend the program logic dFHL in the previous work and introduce a novel formalism of hybrid control flow graphs on which our algorithm can automatically discover an RSS condition that ensures safety. An RSS condition thus discovered is experimentally evaluated; we observe that it is safe (as our safety proof says) and is not overly conservative.
Goal-Aware RSS for Complex Scenarios via Program Logic
Jul 06, 2022
We introduce a goal-aware extension of responsibility-sensitive safety (RSS), a recent methodology for rule-based safety guarantee for automated driving systems (ADS). Making RSS rules guarantee goal achievement -- in addition to collision avoidance as in the original RSS -- requires complex planning over long sequences of manoeuvres. To deal with the complexity, we introduce a compositional reasoning framework based on program logic, in which one can systematically develop RSS rules for smaller subscenarios and combine them to obtain RSS rules for bigger scenarios. As the basis of the framework, we introduce a program logic dFHL that accommodates continuous dynamics and safety conditions. Our framework presents a dFHL-based workflow for deriving goal-aware RSS rules; we discuss its software support, too. We conducted experimental evaluation using RSS rules in a safety architecture. Its results show that goal-aware RSS is indeed effective in realising both collision avoidance and goal achievement.