 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForecasting Trajectory and Behavior of Road-Agents Using Spectral Clustering in Graph-LSTMs
Dec 02, 2019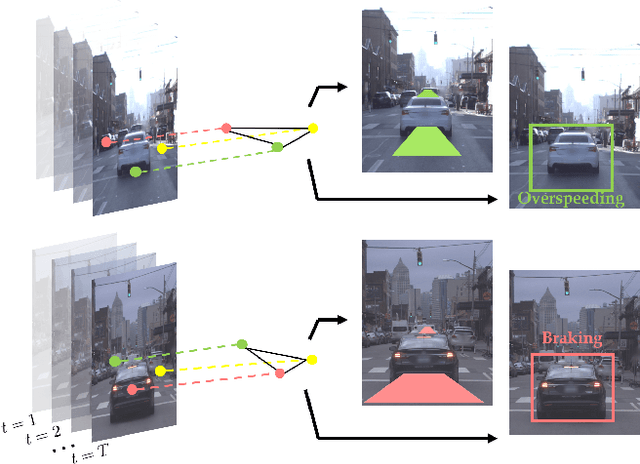



We present a novel approach for traffic forecasting in urban traffic scenarios using a combination of spectral graph analysis and deep learning. We predict both the low-level information (future trajectories) as well as the high-level information (road-agent behavior) from the extracted trajectory of each road-agent. Our formulation represents the proximity between the road agents using a dynamic weighted traffic-graph. We use a two-stream graph convolutional LSTM network to perform traffic forecasting using these weighted traffic-graphs. The first stream predicts the spatial coordinates of road-agents, while the second stream predicts whether a road-agent is going to exhibit aggressive, conservative, or normal behavior. We introduce spectral cluster regularization to reduce the error margin in long-term prediction (3-5 seconds) and improve the accuracy of the predicted trajectories. We evaluate our approach on the Argoverse, Lyft, and Apolloscape datasets and highlight the benefits over prior trajectory prediction methods. In practice, our approach reduces the average prediction error by more than 54% over prior algorithms and achieves a weighted average accuracy of 91.2% for behavior prediction.