 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndoor Light and Heat Estimation from a Single Panorama
Feb 10, 2025



This paper presents a novel application for directly estimating indoor light and heat maps from captured indoor-outdoor High Dynamic Range (HDR) panoramas. In our image-based rendering method, the indoor panorama is used to estimate the 3D room layout, while the corresponding outdoor panorama serves as an environment map to infer spatially-varying light and material properties. We establish a connection between indoor light transport and heat transport and implement transient heat simulation to generate indoor heat panoramas. The sensitivity analysis of various thermal parameters is conducted, and the resulting heat maps are compared with the images captured by the thermal camera in real-world scenarios. This digital application enables automatic indoor light and heat estimation without manual inputs and cumbersome field measurements.
Long-HOT: A Modular Hierarchical Approach for Long-Horizon Object Transport
Oct 28, 2022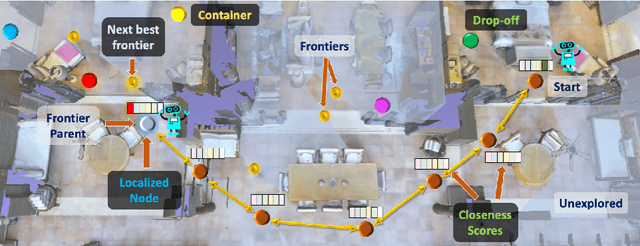


We address key challenges in long-horizon embodied exploration and navigation by proposing a new object transport task and a novel modular framework for temporally extended navigation. Our first contribution is the design of a novel Long-HOT environment focused on deep exploration and long-horizon planning where the agent is required to efficiently find and pick up target objects to be carried and dropped at a goal location, with load constraints and optional access to a container if it finds one. Further, we propose a modular hierarchical transport policy (HTP) that builds a topological graph of the scene to perform exploration with the help of weighted frontiers. Our hierarchical approach uses a combination of motion planning algorithms to reach point goals within explored locations and object navigation policies for moving towards semantic targets at unknown locations. Experiments on both our proposed Habitat transport task and on MultiOn benchmarks show that our method significantly outperforms baselines and prior works. Further, we validate the effectiveness of our modular approach for long-horizon transport by demonstrating meaningful generalization to much harder transport scenes with training only on simpler versions of the task.
Divide-and-Conquer for Lane-Aware Diverse Trajectory Prediction
Apr 16, 2021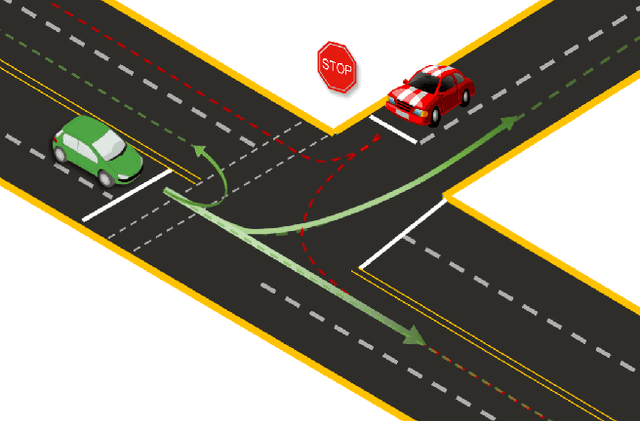
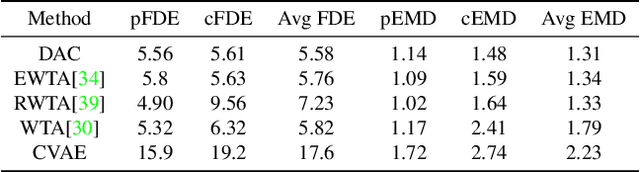

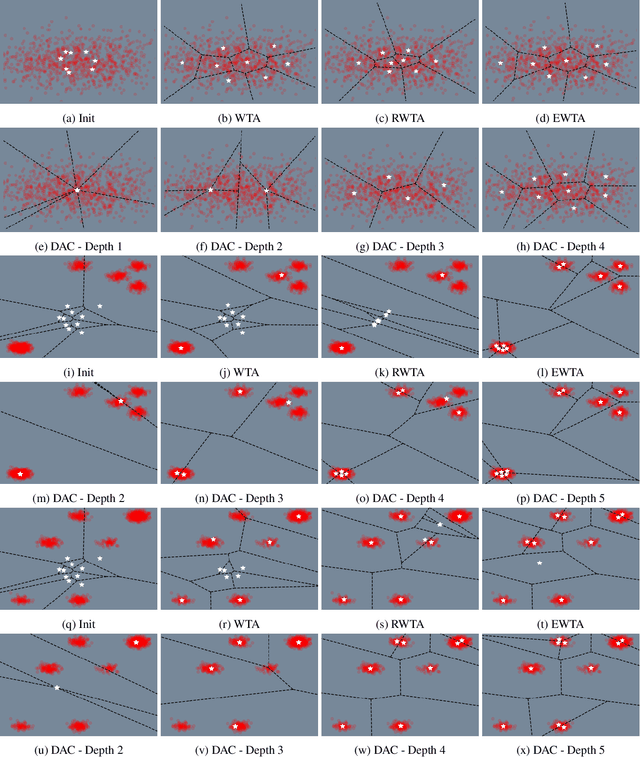
Trajectory prediction is a safety-critical tool for autonomous vehicles to plan and execute actions. Our work addresses two key challenges in trajectory prediction, learning multimodal outputs, and better predictions by imposing constraints using driving knowledge. Recent methods have achieved strong performances using Multi-Choice Learning objectives like winner-takes-all (WTA) or best-of-many. But the impact of those methods in learning diverse hypotheses is under-studied as such objectives highly depend on their initialization for diversity. As our first contribution, we propose a novel Divide-And-Conquer (DAC) approach that acts as a better initialization technique to WTA objective, resulting in diverse outputs without any spurious modes. Our second contribution is a novel trajectory prediction framework called ALAN that uses existing lane centerlines as anchors to provide trajectories constrained to the input lanes. Our framework provides multi-agent trajectory outputs in a forward pass by capturing interactions through hypercolumn descriptors and incorporating scene information in the form of rasterized images and per-agent lane anchors. Experiments on synthetic and real data show that the proposed DAC captures the data distribution better compare to other WTA family of objectives. Further, we show that our ALAN approach provides on par or better performance with SOTA methods evaluated on Nuscenes urban driving benchmark.