 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDivide-and-Conquer for Lane-Aware Diverse Trajectory Prediction
Apr 16, 2021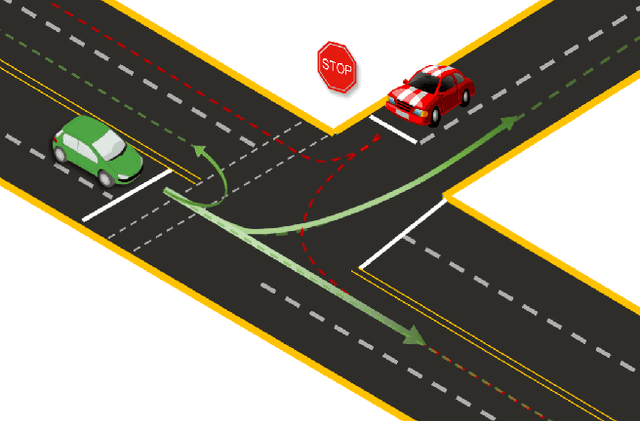
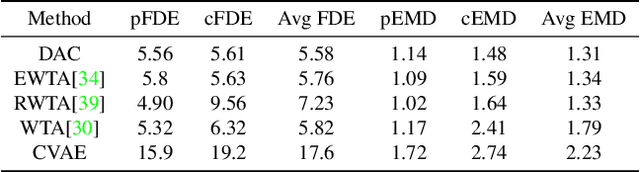

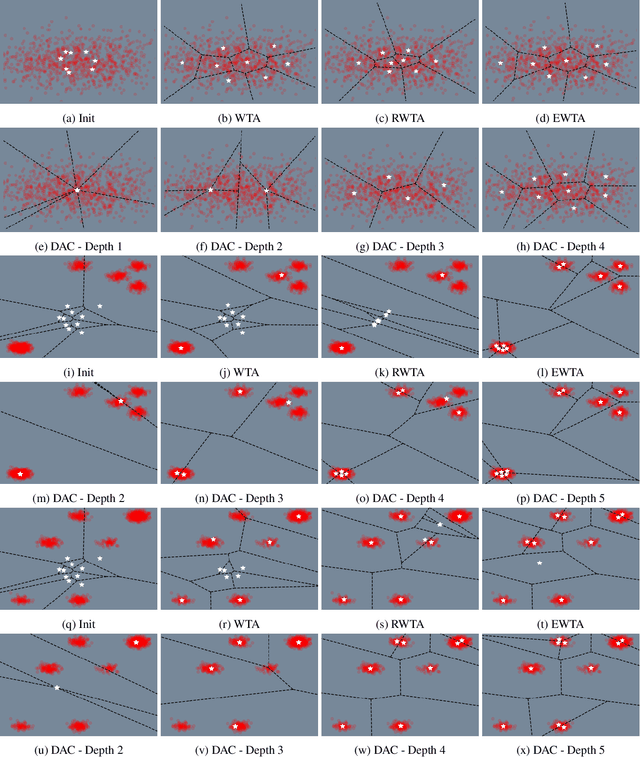
Trajectory prediction is a safety-critical tool for autonomous vehicles to plan and execute actions. Our work addresses two key challenges in trajectory prediction, learning multimodal outputs, and better predictions by imposing constraints using driving knowledge. Recent methods have achieved strong performances using Multi-Choice Learning objectives like winner-takes-all (WTA) or best-of-many. But the impact of those methods in learning diverse hypotheses is under-studied as such objectives highly depend on their initialization for diversity. As our first contribution, we propose a novel Divide-And-Conquer (DAC) approach that acts as a better initialization technique to WTA objective, resulting in diverse outputs without any spurious modes. Our second contribution is a novel trajectory prediction framework called ALAN that uses existing lane centerlines as anchors to provide trajectories constrained to the input lanes. Our framework provides multi-agent trajectory outputs in a forward pass by capturing interactions through hypercolumn descriptors and incorporating scene information in the form of rasterized images and per-agent lane anchors. Experiments on synthetic and real data show that the proposed DAC captures the data distribution better compare to other WTA family of objectives. Further, we show that our ALAN approach provides on par or better performance with SOTA methods evaluated on Nuscenes urban driving benchmark.
Adaptive Traffic Control with Deep Reinforcement Learning: Towards State-of-the-art and Beyond
Jul 21, 2020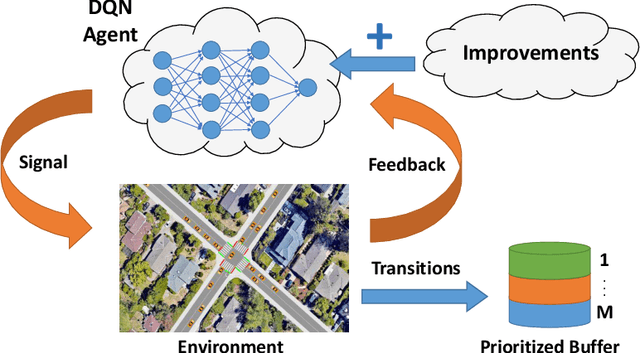
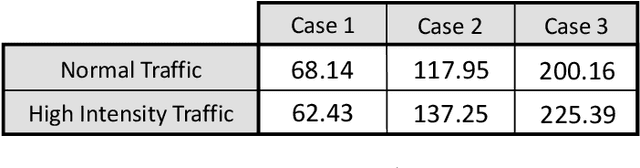
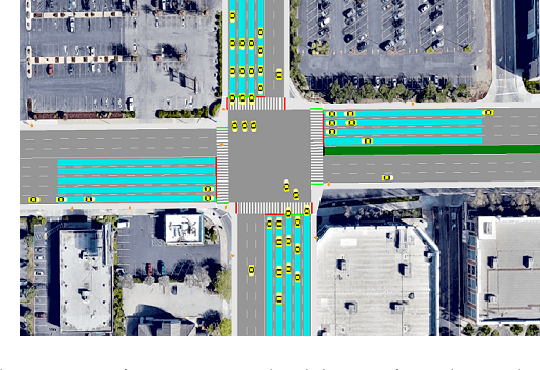
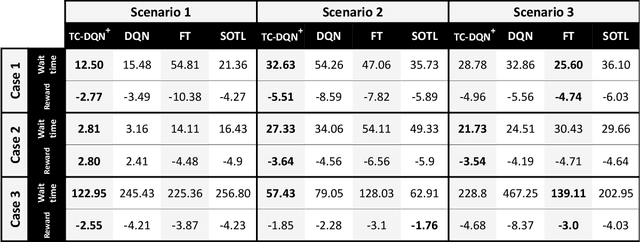
In this work, we study adaptive data-guided traffic planning and control using Reinforcement Learning (RL). We shift from the plain use of classic methods towards state-of-the-art in deep RL community. We embed several recent techniques in our algorithm that improve the original Deep Q-Networks (DQN) for discrete control and discuss the traffic-related interpretations that follow. We propose a novel DQN-based algorithm for Traffic Control (called TC-DQN+) as a tool for fast and more reliable traffic decision-making. We introduce a new form of reward function which is further discussed using illustrative examples with comparisons to traditional traffic control methods.