 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadarTrack: Enhancing Ego-Vehicle Speed Estimation with Single-chip mmWave Radar
Apr 20, 2025In this work, we introduce RadarTrack, an innovative ego-speed estimation framework utilizing a single-chip millimeter-wave (mmWave) radar to deliver robust speed estimation for mobile platforms. Unlike previous methods that depend on cross-modal learning and computationally intensive Deep Neural Networks (DNNs), RadarTrack utilizes a novel phase-based speed estimation approach. This method effectively overcomes the limitations of conventional ego-speed estimation approaches which rely on doppler measurements and static surrondings. RadarTrack is designed for low-latency operation on embedded platforms, making it suitable for real-time applications where speed and efficiency are critical. Our key contributions include the introduction of a novel phase-based speed estimation technique solely based on signal processing and the implementation of a real-time prototype validated through extensive real-world evaluations. By providing a reliable and lightweight solution for ego-speed estimation, RadarTrack holds significant potential for a wide range of applications, including micro-robotics, augmented reality, and autonomous navigation.
SafeInfer: Context Adaptive Decoding Time Safety Alignment for Large Language Models
Jun 18, 2024



Safety-aligned language models often exhibit fragile and imbalanced safety mechanisms, increasing the likelihood of generating unsafe content. In addition, incorporating new knowledge through editing techniques to language models can further compromise safety. To address these issues, we propose SafeInfer, a context-adaptive, decoding-time safety alignment strategy for generating safe responses to user queries. SafeInfer comprises two phases: the safety amplification phase, which employs safe demonstration examples to adjust the model's hidden states and increase the likelihood of safer outputs, and the safety-guided decoding phase, which influences token selection based on safety-optimized distributions, ensuring the generated content complies with ethical guidelines. Further, we present HarmEval, a novel benchmark for extensive safety evaluations, designed to address potential misuse scenarios in accordance with the policies of leading AI tech giants.
Dynamic Ego-Velocity estimation Using Moving mmWave Radar: A Phase-Based Approach
Apr 15, 2024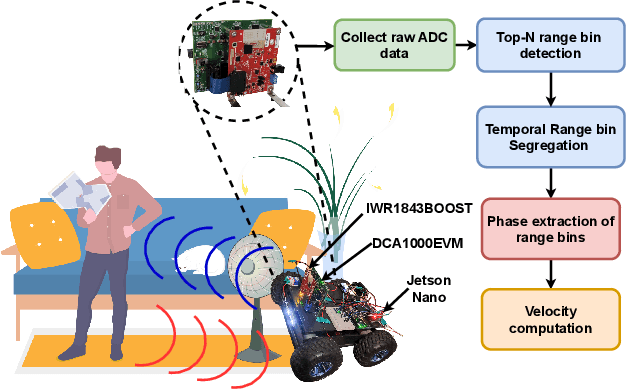
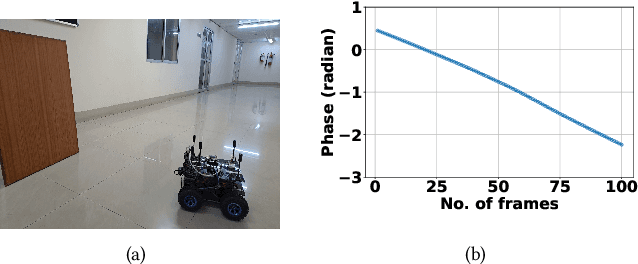
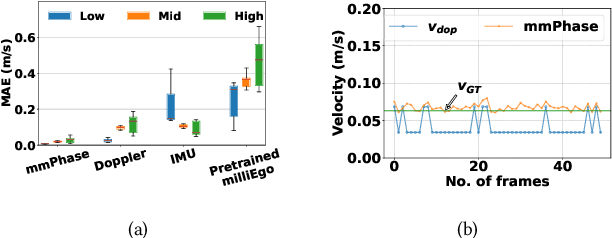
Precise ego-motion measurement is crucial for various applications, including robotics, augmented reality, and autonomous navigation. In this poster, we propose mmPhase, an odometry framework based on single-chip millimetre-wave (mmWave) radar for robust ego-motion estimation in mobile platforms without requiring additional modalities like the visual, wheel, or inertial odometry. mmPhase leverages a phase-based velocity estimation approach to overcome the limitations of conventional doppler resolution. For real-world evaluations of mmPhase we have developed an ego-vehicle prototype. Compared to the state-of-the-art baselines, mmPhase shows superior performance in ego-velocity estimation.