 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRadarTrack: Enhancing Ego-Vehicle Speed Estimation with Single-chip mmWave Radar
Apr 20, 2025In this work, we introduce RadarTrack, an innovative ego-speed estimation framework utilizing a single-chip millimeter-wave (mmWave) radar to deliver robust speed estimation for mobile platforms. Unlike previous methods that depend on cross-modal learning and computationally intensive Deep Neural Networks (DNNs), RadarTrack utilizes a novel phase-based speed estimation approach. This method effectively overcomes the limitations of conventional ego-speed estimation approaches which rely on doppler measurements and static surrondings. RadarTrack is designed for low-latency operation on embedded platforms, making it suitable for real-time applications where speed and efficiency are critical. Our key contributions include the introduction of a novel phase-based speed estimation technique solely based on signal processing and the implementation of a real-time prototype validated through extensive real-world evaluations. By providing a reliable and lightweight solution for ego-speed estimation, RadarTrack holds significant potential for a wide range of applications, including micro-robotics, augmented reality, and autonomous navigation.
EyeTrAES: Fine-grained, Low-Latency Eye Tracking via Adaptive Event Slicing
Sep 27, 2024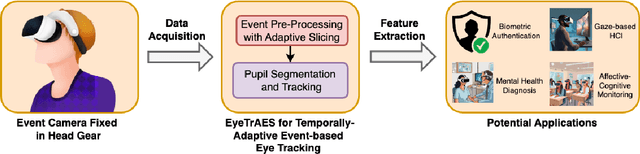
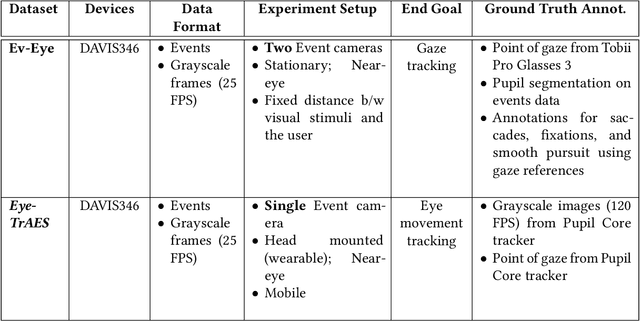
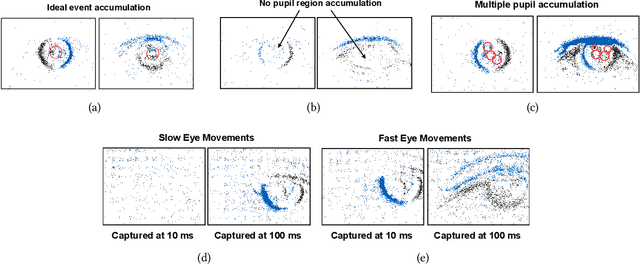
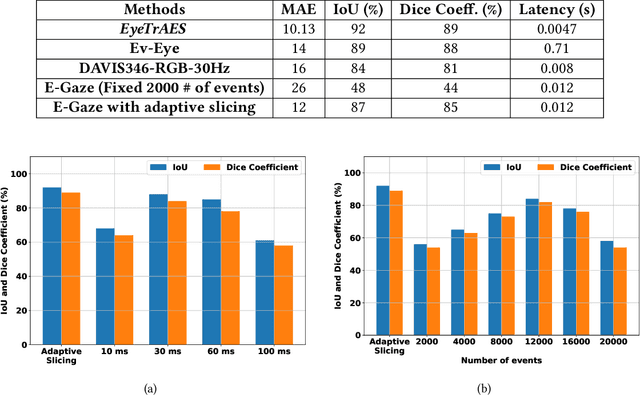
Eye-tracking technology has gained significant attention in recent years due to its wide range of applications in human-computer interaction, virtual and augmented reality, and wearable health. Traditional RGB camera-based eye-tracking systems often struggle with poor temporal resolution and computational constraints, limiting their effectiveness in capturing rapid eye movements. To address these limitations, we propose EyeTrAES, a novel approach using neuromorphic event cameras for high-fidelity tracking of natural pupillary movement that shows significant kinematic variance. One of EyeTrAES's highlights is the use of a novel adaptive windowing/slicing algorithm that ensures just the right amount of descriptive asynchronous event data accumulation within an event frame, across a wide range of eye movement patterns. EyeTrAES then applies lightweight image processing functions over accumulated event frames from just a single eye to perform pupil segmentation and tracking. We show that these methods boost pupil tracking fidelity by 6+%, achieving IoU~=92%, while incurring at least 3x lower latency than competing pure event-based eye tracking alternatives [38]. We additionally demonstrate that the microscopic pupillary motion captured by EyeTrAES exhibits distinctive variations across individuals and can thus serve as a biometric fingerprint. For robust user authentication, we train a lightweight per-user Random Forest classifier using a novel feature vector of short-term pupillary kinematics, comprising a sliding window of pupil (location, velocity, acceleration) triples. Experimental studies with two different datasets demonstrate that the EyeTrAES-based authentication technique can simultaneously achieve high authentication accuracy (~=0.82) and low processing latency (~=12ms), and significantly outperform multiple state-of-the-art competitive baselines.
Dynamic Ego-Velocity estimation Using Moving mmWave Radar: A Phase-Based Approach
Apr 15, 2024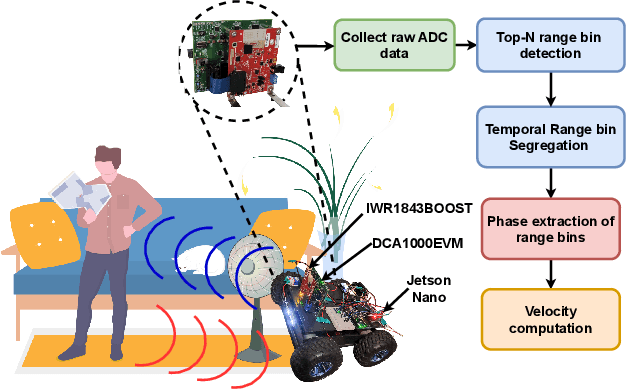
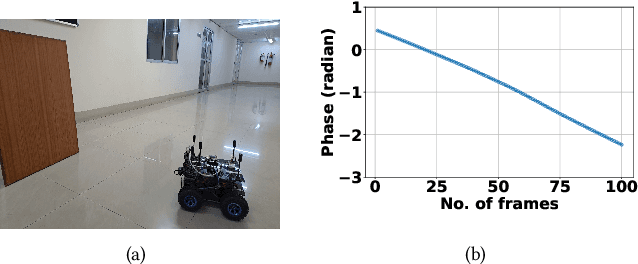
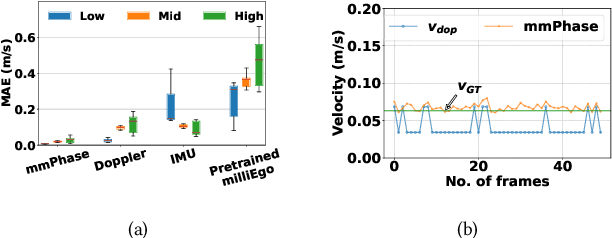
Precise ego-motion measurement is crucial for various applications, including robotics, augmented reality, and autonomous navigation. In this poster, we propose mmPhase, an odometry framework based on single-chip millimetre-wave (mmWave) radar for robust ego-motion estimation in mobile platforms without requiring additional modalities like the visual, wheel, or inertial odometry. mmPhase leverages a phase-based velocity estimation approach to overcome the limitations of conventional doppler resolution. For real-world evaluations of mmPhase we have developed an ego-vehicle prototype. Compared to the state-of-the-art baselines, mmPhase shows superior performance in ego-velocity estimation.