 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLHR: Low Latency and High Reliability CNN Distributed Inference for Resource-Constrained UAV Swarms
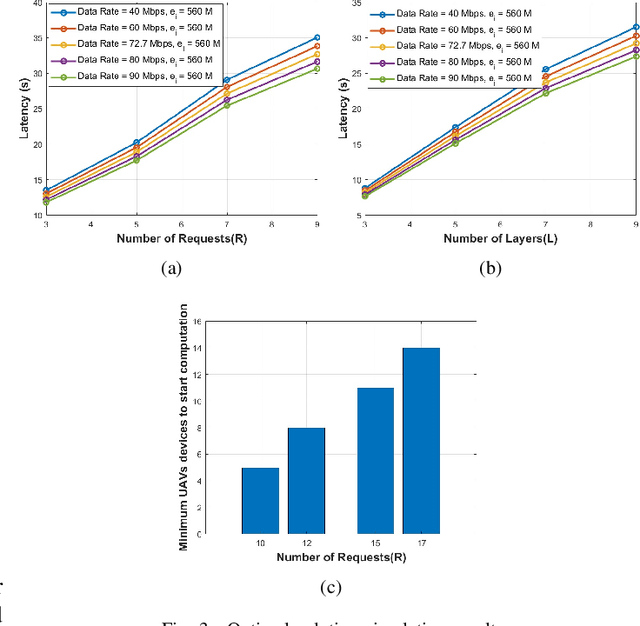
May 25, 2023Recently, Unmanned Aerial Vehicles (UAVs) have shown impressive performance in many critical applications, such as surveillance, search and rescue operations, environmental monitoring, etc. In many of these applications, the UAVs capture images as well as other sensory data and then send the data processing requests to remote servers. Nevertheless, this approach is not always practical in real-time-based applications due to unstable connections, limited bandwidth, limited energy, and strict end-to-end latency. One promising solution is to divide the inference requests into subtasks that can be distributed among UAVs in a swarm based on the available resources. Moreover, these tasks create intermediate results that need to be transmitted reliably as the swarm moves to cover the area. Our system model deals with real-time requests, aiming to find the optimal transmission power that guarantees higher reliability and low latency. We formulate the Low Latency and High-Reliability (LLHR) distributed inference as an optimization problem, and due to the complexity of the problem, we divide it into three subproblems. In the first subproblem, we find the optimal transmit power of the connected UAVs with guaranteed transmission reliability. The second subproblem aims to find the optimal positions of the UAVs in the grid, while the last subproblem finds the optimal placement of the CNN layers in the available UAVs. We conduct extensive simulations and compare our work to two baseline models demonstrating that our model outperforms the competing models.
* arXiv admin note: substantial text overlap with arXiv:2212.11201
Efficient Real-Time Image Recognition Using Collaborative Swarm of UAVs and Convolutional Networks
Jul 09, 2021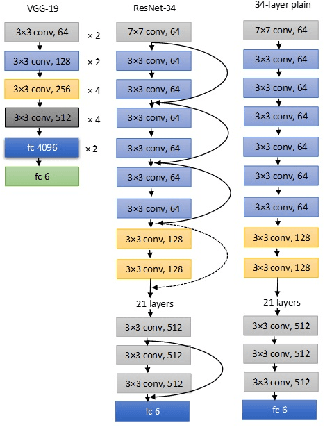
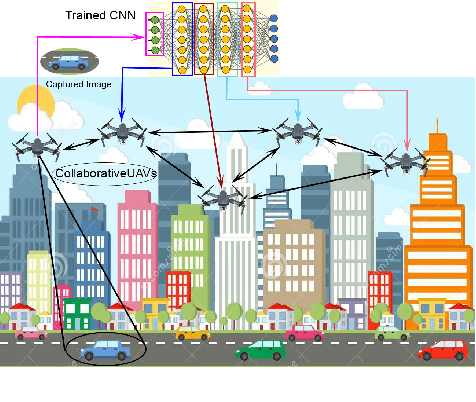
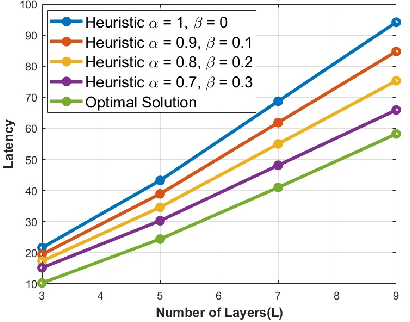
Unmanned Aerial Vehicles (UAVs) have recently attracted significant attention due to their outstanding ability to be used in different sectors and serve in difficult and dangerous areas. Moreover, the advancements in computer vision and artificial intelligence have increased the use of UAVs in various applications and solutions, such as forest fires detection and borders monitoring. However, using deep neural networks (DNNs) with UAVs introduces several challenges of processing deeper networks and complex models, which restricts their on-board computation. In this work, we present a strategy aiming at distributing inference requests to a swarm of resource-constrained UAVs that classifies captured images on-board and finds the minimum decision-making latency. We formulate the model as an optimization problem that minimizes the latency between acquiring images and making the final decisions. The formulated optimization solution is an NP-hard problem. Hence it is not adequate for online resource allocation. Therefore, we introduce an online heuristic solution, namely DistInference, to find the layers placement strategy that gives the best latency among the available UAVs. The proposed approach is general enough to be used for different low decision-latency applications as well as for all CNN types organized into the pipeline of layers (e.g., VGG) or based on residual blocks (e.g., ResNet).