 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAEROBULL: A Center-of-Mass Displacing Aerial Vehicle Enabling Efficient High-Force Interaction
Aug 27, 2024



In various industrial sectors, inspection and maintenance tasks using UAV (Unmanned Aerial Vehicle) require substantial force application to ensure effective adherence and stable contact, posing significant challenges to existing solutions. This paper addresses these industrial needs by introducing a novel lightweight aerial platform (3.12kg) designed to exert high pushing forces on non-horizontal surfaces. To increase maneuverability, the proposed platform incorporates tiltable rotors with 5-DoF (Degree of Freedom) actuation. Moreover, it has an innovative shifting-mass mechanism that dynamically adjusts the system's CoM (Center of Mass) during contact-based task execution. A compliant EE (End-Effector) is applied to ensure a smooth interaction with the work surface. We provide a detailed study of the UAV's overall system design, hardware integration of the developed physical prototype, and software architecture of the proposed control algorithm. Physical experiments were conducted to validate the control design and explore the force generation capability of the designed platform via a pushing task. With a total mass of 3.12kg, the UAV exerted a maximum pushing force of above 28N being almost equal to its gravity force. Furthermore, the experiments illustrated the benefits of having displaced CoM by benchmarking with a fixed CoM configuration.
Development of a semi-autonomous framework for NDT inspection with a tilting aerial platform
Jul 03, 2024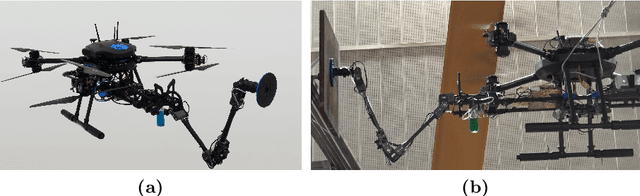
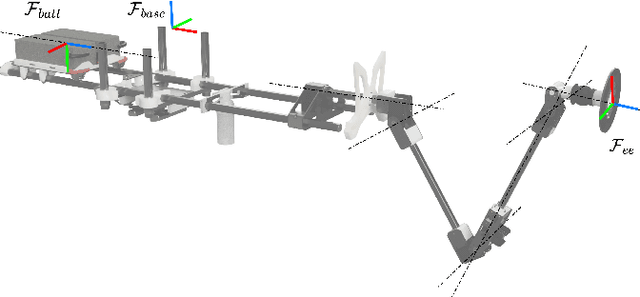
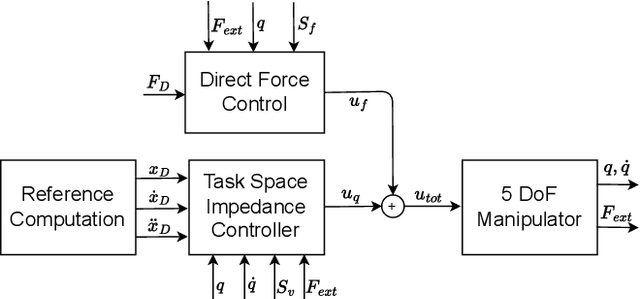
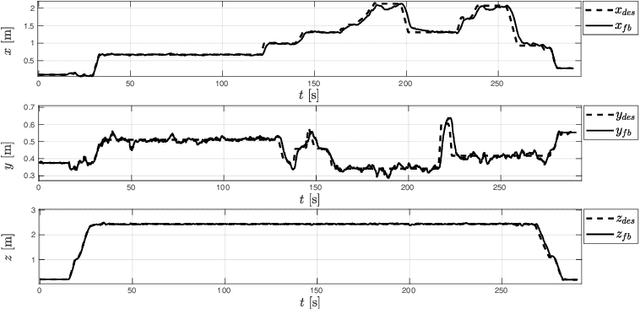
This letter investigates the problem of controlling an aerial manipulator, composed of an omnidirectional tilting drone equipped with a five-degrees-of-freedom robotic arm. The robot has to interact with the environment to inspect structures and perform non-destructive measurements. A parallel force-impedance control technique is developed to establish contact with the designed surface with a desired force profile. During the interaction, a pushing phase is required to create a vacuum between the surface and the echometer sensor mounted at the end-effector, to measure the thickness of the interaction surface. Repetitive measures are performed to show the repeatability of the algorithm.