 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning with Random Delays
Oct 08, 2020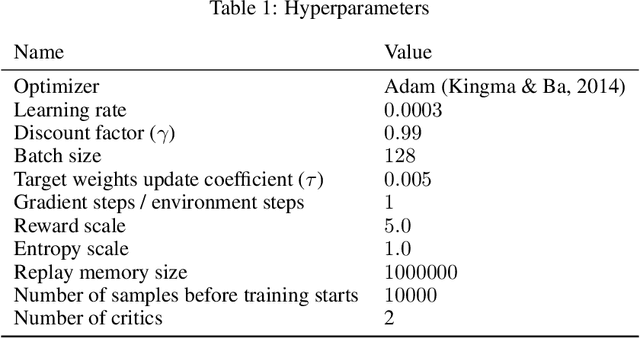
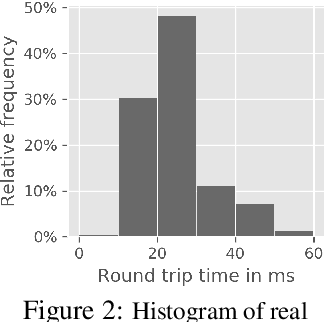
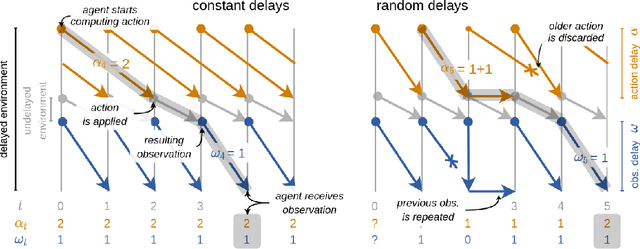
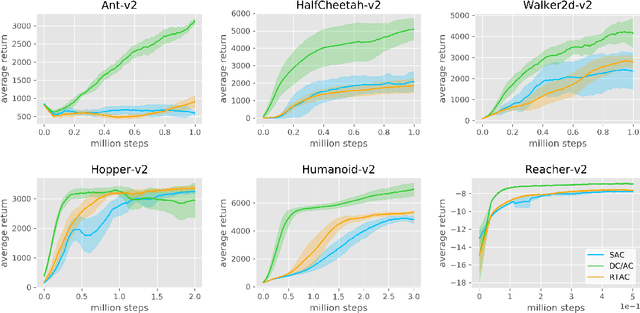
Action and observation delays commonly occur in many Reinforcement Learning applications, such as remote control scenarios. We study the anatomy of randomly delayed environments, and show that partially resampling trajectory fragments in hindsight allows for off-policy multi-step value estimation. We apply this principle to derive Delay-Correcting Actor-Critic (DCAC), an algorithm based on Soft Actor-Critic with significantly better performance in environments with delays. This is shown theoretically and also demonstrated practically on a delay-augmented version of the MuJoCo continuous control benchmark.
Real-Time Reinforcement Learning
Dec 12, 2019
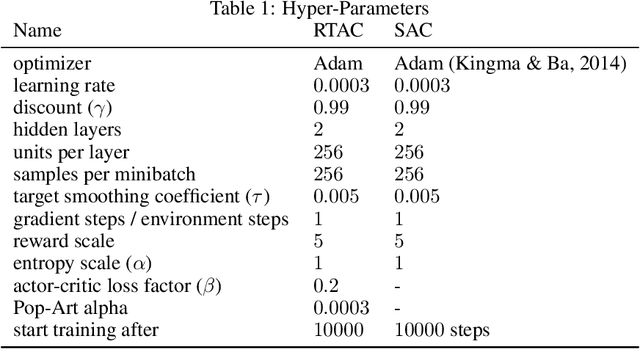


Markov Decision Processes (MDPs), the mathematical framework underlying most algorithms in Reinforcement Learning (RL), are often used in a way that wrongfully assumes that the state of an agent's environment does not change during action selection. As RL systems based on MDPs begin to find application in real-world safety critical situations, this mismatch between the assumptions underlying classical MDPs and the reality of real-time computation may lead to undesirable outcomes. In this paper, we introduce a new framework, in which states and actions evolve simultaneously and show how it is related to the classical MDP formulation. We analyze existing algorithms under the new real-time formulation and show why they are suboptimal when used in real-time. We then use those insights to create a new algorithm Real-Time Actor-Critic (RTAC) that outperforms the existing state-of-the-art continuous control algorithm Soft Actor-Critic both in real-time and non-real-time settings. Code and videos can be found at https://github.com/rmst/rtrl.