 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian ODE Solvers: The Maximum A Posteriori Estimate
Apr 01, 2020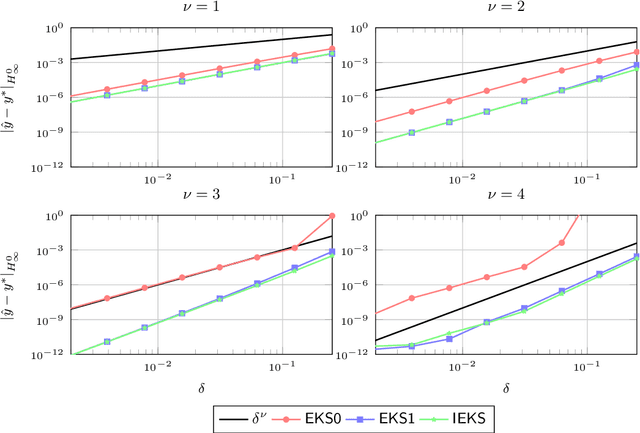
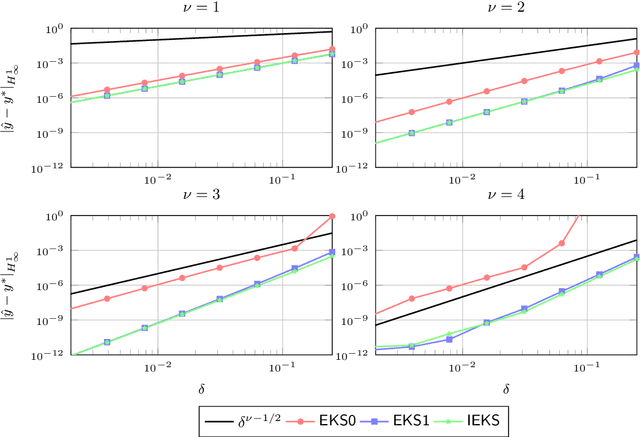
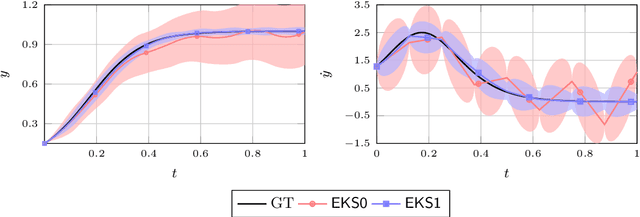
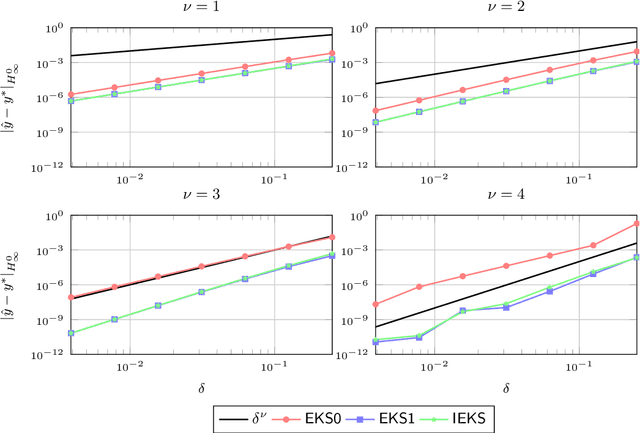
It has recently been established that the numerical solution of ordinary differential equations can be posed as a nonlinear Bayesian inference problem, which can be approximately solved via Gaussian filtering and smoothing, whenever a Gauss--Markov prior is used. In this paper the class of $\nu$ times differentiable linear time invariant Gauss--Markov priors is considered. A taxonomy of Gaussian estimators is established, with the maximum a posteriori estimate at the top of the hierarchy, which can be computed with the iterated extended Kalman smoother. The remaining three classes are termed explicit, semi-implicit, and implicit, which are in similarity with the classical notions corresponding to conditions on the vector field, under which the filter update produces a local maximum a posteriori estimate. The maximum a posteriori estimate corresponds to an optimal interpolant in the reproducing Hilbert space associated with the prior, which in the present case is equivalent to a Sobolev space of smoothness $\nu+1$. Consequently, using methods from scattered data approximation and nonlinear analysis in Sobolev spaces, it is shown that the maximum a posteriori estimate converges to the true solution at a polynomial rate in the fill-distance (maximum step size) subject to mild conditions on the vector field. The methodology developed provides a novel and more natural approach to study the convergence of these estimators than classical methods of convergence analysis. The methods and theoretical results are demonstrated in numerical examples.
State-Space Inference for Non-Linear Latent Force Models with Application to Satellite Orbit Prediction
Jun 18, 2012Latent force models (LFMs) are flexible models that combine mechanistic modelling principles (i.e., physical models) with non-parametric data-driven components. Several key applications of LFMs need non-linearities, which results in analytically intractable inference. In this work we show how non-linear LFMs can be represented as non-linear white noise driven state-space models and present an efficient non-linear Kalman filtering and smoothing based method for approximate state and parameter inference. We illustrate the performance of the proposed methodology via two simulated examples, and apply it to a real-world problem of long-term prediction of GPS satellite orbits.
Sequential Inference for Latent Force Models
Feb 14, 2012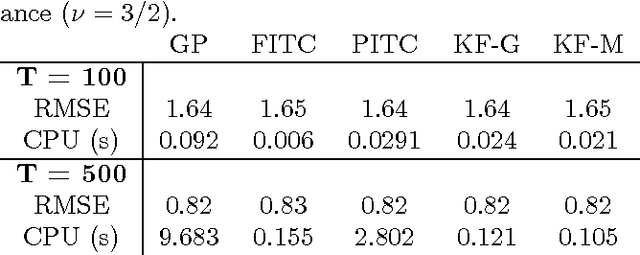
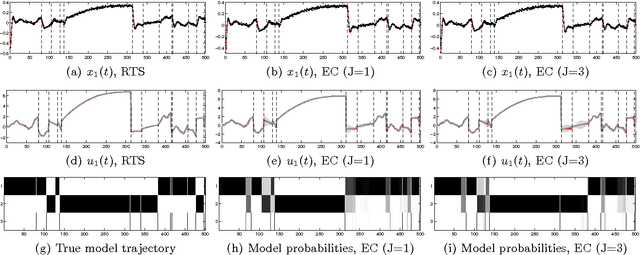
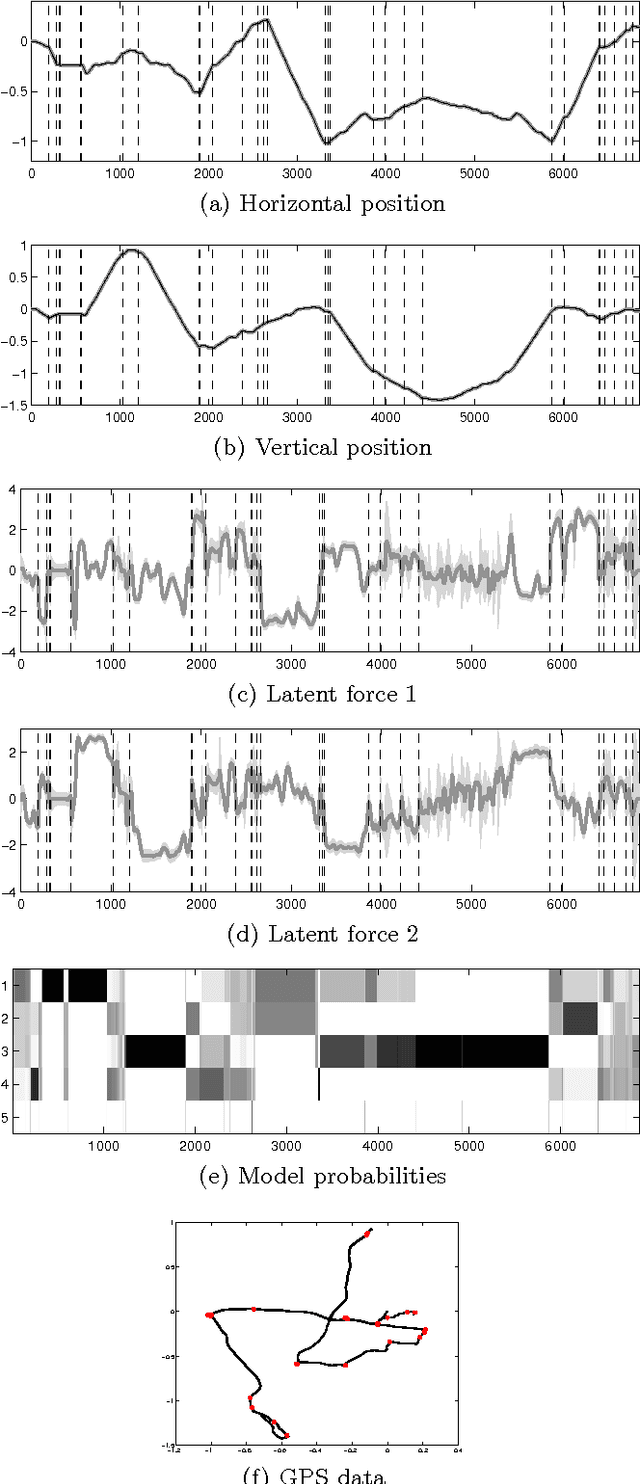
Latent force models (LFMs) are hybrid models combining mechanistic principles with non-parametric components. In this article, we shall show how LFMs can be equivalently formulated and solved using the state variable approach. We shall also show how the Gaussian process prior used in LFMs can be equivalently formulated as a linear statespace model driven by a white noise process and how inference on the resulting model can be efficiently implemented using Kalman filter and smoother. Then we shall show how the recently proposed switching LFM can be reformulated using the state variable approach, and how we can construct a probabilistic model for the switches by formulating a similar switching LFM as a switching linear dynamic system (SLDS). We illustrate the performance of the proposed methodology in simulated scenarios and apply it to inferring the switching points in GPS data collected from car movement data in urban environment.