 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBayesian ODE Solvers: The Maximum A Posteriori Estimate
Paper and Code
Apr 01, 2020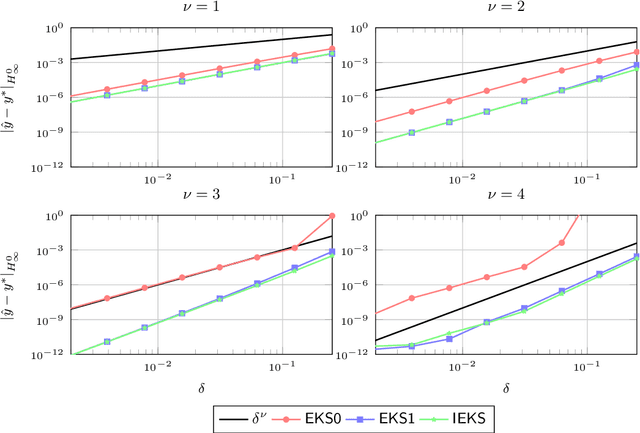
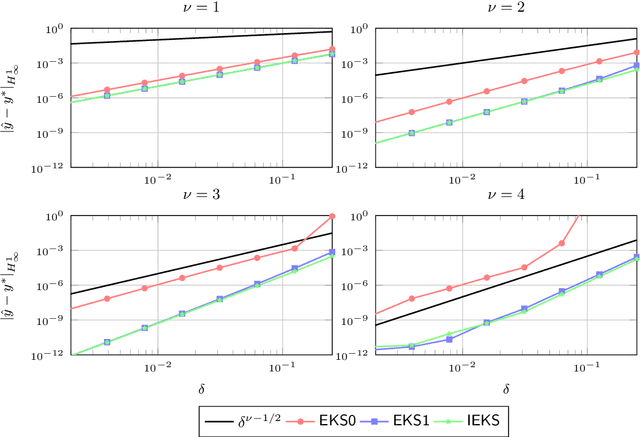
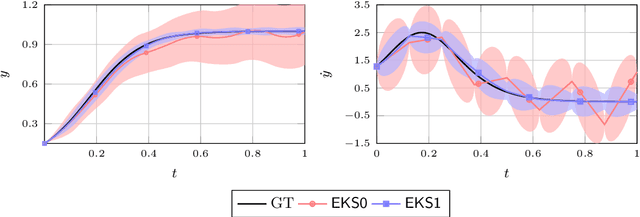
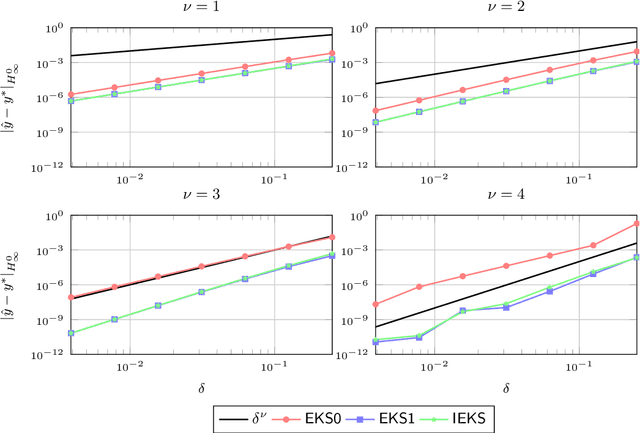
It has recently been established that the numerical solution of ordinary differential equations can be posed as a nonlinear Bayesian inference problem, which can be approximately solved via Gaussian filtering and smoothing, whenever a Gauss--Markov prior is used. In this paper the class of $\nu$ times differentiable linear time invariant Gauss--Markov priors is considered. A taxonomy of Gaussian estimators is established, with the maximum a posteriori estimate at the top of the hierarchy, which can be computed with the iterated extended Kalman smoother. The remaining three classes are termed explicit, semi-implicit, and implicit, which are in similarity with the classical notions corresponding to conditions on the vector field, under which the filter update produces a local maximum a posteriori estimate. The maximum a posteriori estimate corresponds to an optimal interpolant in the reproducing Hilbert space associated with the prior, which in the present case is equivalent to a Sobolev space of smoothness $\nu+1$. Consequently, using methods from scattered data approximation and nonlinear analysis in Sobolev spaces, it is shown that the maximum a posteriori estimate converges to the true solution at a polynomial rate in the fill-distance (maximum step size) subject to mild conditions on the vector field. The methodology developed provides a novel and more natural approach to study the convergence of these estimators than classical methods of convergence analysis. The methods and theoretical results are demonstrated in numerical examples.