 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Imitation from Observation Approach to Sim-to-Real Transfer
Aug 04, 2020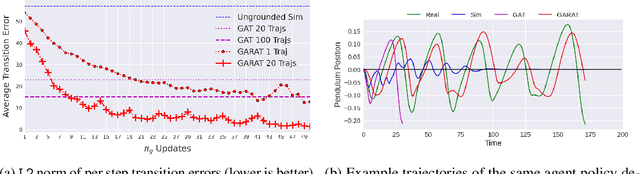
The sim to real transfer problem deals with leveraging large amounts of inexpensive simulation experience to help artificial agents learn behaviors intended for the real world more efficiently. One approach to sim-to-real transfer is using interactions with the real world to make the simulator more realistic, called grounded sim to-real transfer. In this paper, we show that a particular grounded sim-to-real approach, grounded action transformation, is closely related to the problem of imitation from observation IfO, learning behaviors that mimic the observations of behavior demonstrations. After establishing this relationship, we hypothesize that recent state-of-the-art approaches from the IfO literature can be effectively repurposed for such grounded sim-to-real transfer. To validate our hypothesis we derive a new sim-to-real transfer algorithm - generative adversarial reinforced action transformation (GARAT) - based on adversarial imitation from observation techniques. We run experiments in several simulation domains with mismatched dynamics, and find that agents trained with GARAT achieve higher returns in the real world compared to existing black-box sim-to-real methods