 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRealCamo: Boosting Real Camouflage Synthesis with Layout Controls and Textual-Visual Guidance
Dec 28, 2025Camouflaged image generation (CIG) has recently emerged as an efficient alternative for acquiring high-quality training data for camouflaged object detection (COD). However, existing CIG methods still suffer from a substantial gap to real camouflaged imagery: generated images either lack sufficient camouflage due to weak visual similarity, or exhibit cluttered backgrounds that are semantically inconsistent with foreground targets. To address these limitations, we propose ReamCamo, a unified out-painting based framework for realistic camouflaged image generation. ReamCamo explicitly introduces additional layout controls to regulate global image structure, thereby improving semantic coherence between foreground objects and generated backgrounds. Moreover, we construct a multi-modal textual-visual condition by combining a unified fine-grained textual task description with texture-oriented background retrieval, which jointly guides the generation process to enhance visual fidelity and realism. To quantitatively assess camouflage quality, we further introduce a background-foreground distribution divergence metric that measures the effectiveness of camouflage in generated images. Extensive experiments and visualizations demonstrate the effectiveness of our proposed framework.
GaussianUDF: Inferring Unsigned Distance Functions through 3D Gaussian Splatting
Mar 25, 2025Reconstructing open surfaces from multi-view images is vital in digitalizing complex objects in daily life. A widely used strategy is to learn unsigned distance functions (UDFs) by checking if their appearance conforms to the image observations through neural rendering. However, it is still hard to learn continuous and implicit UDF representations through 3D Gaussians splatting (3DGS) due to the discrete and explicit scene representation, i.e., 3D Gaussians. To resolve this issue, we propose a novel approach to bridge the gap between 3D Gaussians and UDFs. Our key idea is to overfit thin and flat 2D Gaussian planes on surfaces, and then, leverage the self-supervision and gradient-based inference to supervise unsigned distances in both near and far area to surfaces. To this end, we introduce novel constraints and strategies to constrain the learning of 2D Gaussians to pursue more stable optimization and more reliable self-supervision, addressing the challenges brought by complicated gradient field on or near the zero level set of UDFs. We report numerical and visual comparisons with the state-of-the-art on widely used benchmarks and real data to show our advantages in terms of accuracy, efficiency, completeness, and sharpness of reconstructed open surfaces with boundaries. Project page: https://lisj575.github.io/GaussianUDF/
Learning Continuous Implicit Field with Local Distance Indicator for Arbitrary-Scale Point Cloud Upsampling
Dec 23, 2023Point cloud upsampling aims to generate dense and uniformly distributed point sets from a sparse point cloud, which plays a critical role in 3D computer vision. Previous methods typically split a sparse point cloud into several local patches, upsample patch points, and merge all upsampled patches. However, these methods often produce holes, outliers or nonuniformity due to the splitting and merging process which does not maintain consistency among local patches. To address these issues, we propose a novel approach that learns an unsigned distance field guided by local priors for point cloud upsampling. Specifically, we train a local distance indicator (LDI) that predicts the unsigned distance from a query point to a local implicit surface. Utilizing the learned LDI, we learn an unsigned distance field to represent the sparse point cloud with patch consistency. At inference time, we randomly sample queries around the sparse point cloud, and project these query points onto the zero-level set of the learned implicit field to generate a dense point cloud. We justify that the implicit field is naturally continuous, which inherently enables the application of arbitrary-scale upsampling without necessarily retraining for various scales. We conduct comprehensive experiments on both synthetic data and real scans, and report state-of-the-art results under widely used benchmarks.
Learning a More Continuous Zero Level Set in Unsigned Distance Fields through Level Set Projection
Aug 22, 2023



Latest methods represent shapes with open surfaces using unsigned distance functions (UDFs). They train neural networks to learn UDFs and reconstruct surfaces with the gradients around the zero level set of the UDF. However, the differential networks struggle from learning the zero level set where the UDF is not differentiable, which leads to large errors on unsigned distances and gradients around the zero level set, resulting in highly fragmented and discontinuous surfaces. To resolve this problem, we propose to learn a more continuous zero level set in UDFs with level set projections. Our insight is to guide the learning of zero level set using the rest non-zero level sets via a projection procedure. Our idea is inspired from the observations that the non-zero level sets are much smoother and more continuous than the zero level set. We pull the non-zero level sets onto the zero level set with gradient constraints which align gradients over different level sets and correct unsigned distance errors on the zero level set, leading to a smoother and more continuous unsigned distance field. We conduct comprehensive experiments in surface reconstruction for point clouds, real scans or depth maps, and further explore the performance in unsupervised point cloud upsampling and unsupervised point normal estimation with the learned UDF, which demonstrate our non-trivial improvements over the state-of-the-art methods. Code is available at https://github.com/junshengzhou/LevelSetUDF .
NeAF: Learning Neural Angle Fields for Point Normal Estimation
Nov 30, 2022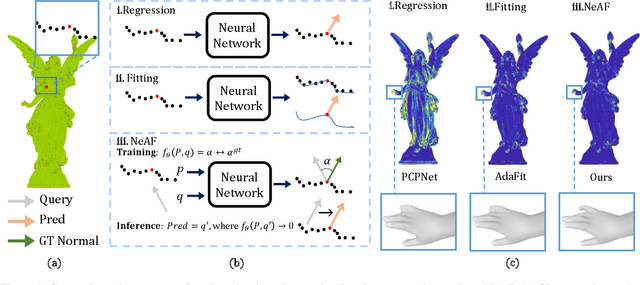
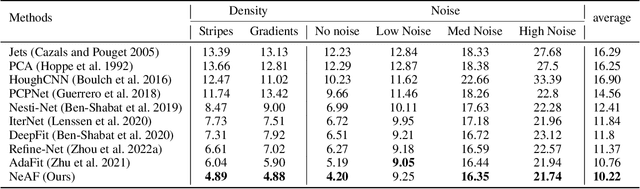
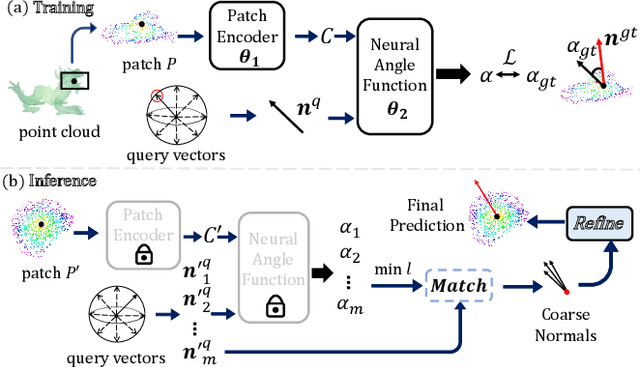
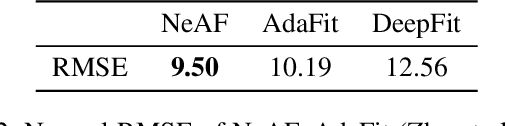
Normal estimation for unstructured point clouds is an important task in 3D computer vision. Current methods achieve encouraging results by mapping local patches to normal vectors or learning local surface fitting using neural networks. However, these methods are not generalized well to unseen scenarios and are sensitive to parameter settings. To resolve these issues, we propose an implicit function to learn an angle field around the normal of each point in the spherical coordinate system, which is dubbed as Neural Angle Fields (NeAF). Instead of directly predicting the normal of an input point, we predict the angle offset between the ground truth normal and a randomly sampled query normal. This strategy pushes the network to observe more diverse samples, which leads to higher prediction accuracy in a more robust manner. To predict normals from the learned angle fields at inference time, we randomly sample query vectors in a unit spherical space and take the vectors with minimal angle values as the predicted normals. To further leverage the prior learned by NeAF, we propose to refine the predicted normal vectors by minimizing the angle offsets. The experimental results with synthetic data and real scans show significant improvements over the state-of-the-art under widely used benchmarks.