 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Autonomous Driving for Linear Temporal Logic Specifications
Sep 15, 2024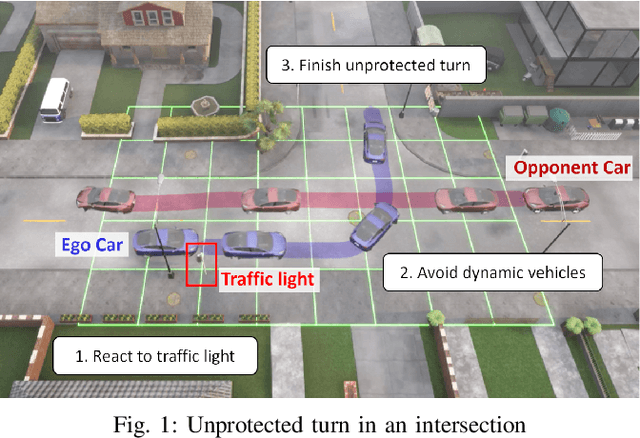
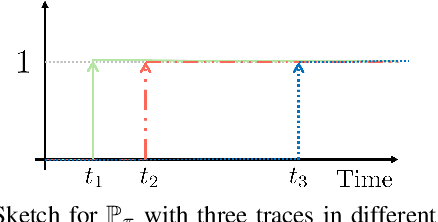
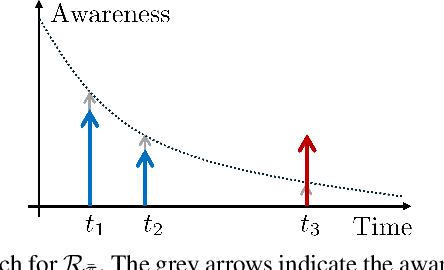

Decision-making for autonomous driving incorporating different types of risks is a challenging topic. This paper proposes a novel risk metric to facilitate the driving task specified by linear temporal logic (LTL) by balancing the risk brought up by different uncertain events. Such a balance is achieved by discounting the costs of these uncertain events according to their timing and severity, thereby reflecting a human-like awareness of risk. We have established a connection between this risk metric and the occupation measure, a fundamental concept in stochastic reachability problems, such that a risk-aware control synthesis problem under LTL specifications is formulated for autonomous vehicles using occupation measures. As a result, the synthesized policy achieves balanced decisions across different types of risks with associated costs, showcasing advantageous versatility and generalizability. The effectiveness and scalability of the proposed approach are validated by three typical traffic scenarios in Carla simulator.
VernaCopter: Disambiguated Natural-Language-Driven Robot via Formal Specifications
Sep 14, 2024



It has been an ambition of many to control a robot for a complex task using natural language (NL). The rise of large language models (LLMs) makes it closer to coming true. However, an LLM-powered system still suffers from the ambiguity inherent in an NL and the uncertainty brought up by LLMs. This paper proposes a novel LLM-based robot motion planner, named \textit{VernaCopter}, with signal temporal logic (STL) specifications serving as a bridge between NL commands and specific task objectives. The rigorous and abstract nature of formal specifications allows the planner to generate high-quality and highly consistent paths to guide the motion control of a robot. Compared to a conventional NL-prompting-based planner, the proposed VernaCopter planner is more stable and reliable due to less ambiguous uncertainty. Its efficacy and advantage have been validated by two small but challenging experimental scenarios, implying its potential in designing NL-driven robots.
Automated Formation Control Synthesis from Temporal Logic Specifications
Apr 05, 2023


In this paper, we propose a novel framework using formal methods to synthesize a navigation control strategy for a multi-robot swarm system with automated formation. The main objective of the problem is to navigate the robot swarm toward a goal position while passing a series of waypoints. The formation of the robot swarm should be changed according to the terrain restrictions around the corresponding waypoint. Also, the motion of the robots should always satisfy certain runtime safety requirements, such as avoiding collision with other robots and obstacles. We prescribe the desired waypoints and formation for the robot swarm using a temporal logic (TL) specification. Then, we formulate the transition of the waypoints and the formation as a deterministic finite transition system (DFTS) and synthesize a control strategy subject to the TL specification. Meanwhile, the runtime safety requirements are encoded using control barrier functions, and fixed-time control Lyapunov functions ensure fixed-time convergence. A quadratic program (QP) problem is solved to refine the DFTS control strategy to generate the control inputs for the robots, such that both TL specifications and runtime safety requirements are satisfied simultaneously. This work enlights a novel solution for multi-robot systems with complicated task specifications. The efficacy of the proposed framework is validated with a simulation study.