 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-Aware Autonomous Driving for Linear Temporal Logic Specifications
Paper and Code
Sep 15, 2024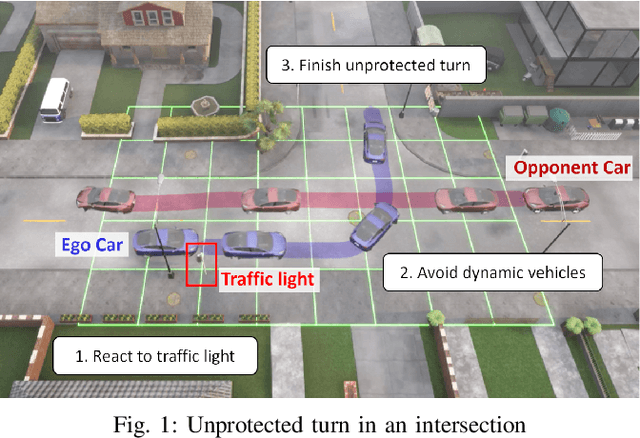
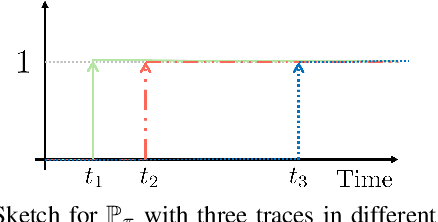
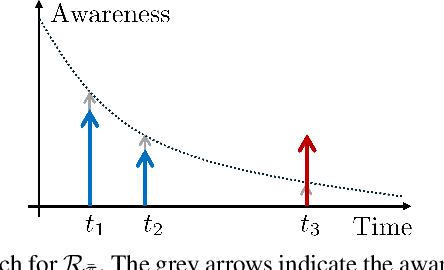

Decision-making for autonomous driving incorporating different types of risks is a challenging topic. This paper proposes a novel risk metric to facilitate the driving task specified by linear temporal logic (LTL) by balancing the risk brought up by different uncertain events. Such a balance is achieved by discounting the costs of these uncertain events according to their timing and severity, thereby reflecting a human-like awareness of risk. We have established a connection between this risk metric and the occupation measure, a fundamental concept in stochastic reachability problems, such that a risk-aware control synthesis problem under LTL specifications is formulated for autonomous vehicles using occupation measures. As a result, the synthesized policy achieves balanced decisions across different types of risks with associated costs, showcasing advantageous versatility and generalizability. The effectiveness and scalability of the proposed approach are validated by three typical traffic scenarios in Carla simulator.