 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTAU-R1: Visual Language Model for Traffic Anomaly Understanding
Mar 19, 2026Traffic Anomaly Understanding (TAU) is important for traffic safety in Intelligent Transportation Systems. Recent vision-language models (VLMs) have shown strong capabilities in video understanding. However, progress on TAU remains limited due to the lack of benchmarks and task-specific methodologies. To address this limitation, we introduce Roundabout-TAU, a dataset constructed from real-world roundabout videos collected in collaboration with the City of Carmel, Indiana. The dataset contains 342 clips and is annotated with more than 2,000 question-answer pairs covering multiple aspects of traffic anomaly understanding. Building on this benchmark, we propose TAU-R1, a two-layer vision-language framework for TAU. The first layer is a lightweight anomaly classifier that performs coarse anomaly categorisation, while the second layer is a larger anomaly reasoner that generates detailed event summaries. To improve task-specific reasoning, we introduce a two-stage training strategy consisting of decomposed-QA-enhanced supervised fine-tuning followed by TAU-GRPO, a GRPO-based post-training method with TAU-specific reward functions. Experimental results show that TAU-R1 achieves strong performance on both anomaly classification and reasoning tasks while maintaining deployment efficiency. The dataset and code are available at: https://github.com/siri-rouser/TAU-R1
Diffusion^2: Dual Diffusion Model with Uncertainty-Aware Adaptive Noise for Momentary Trajectory Prediction
Oct 05, 2025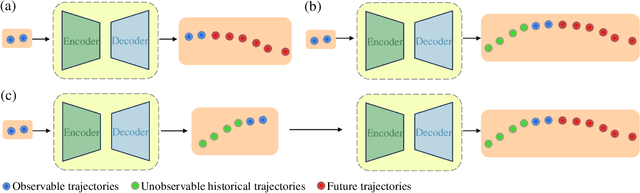
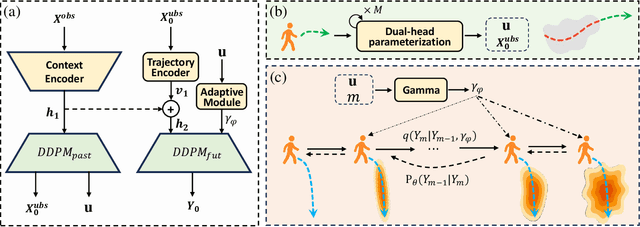
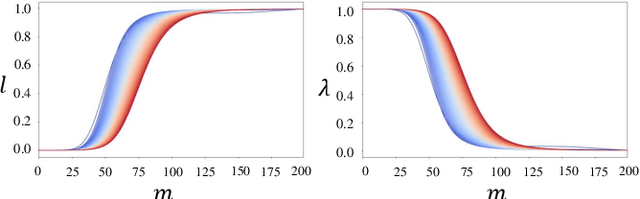
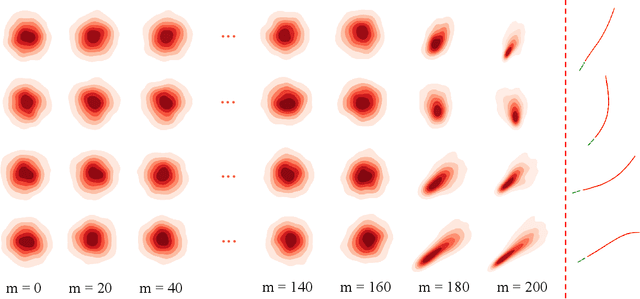
Accurate pedestrian trajectory prediction is crucial for ensuring safety and efficiency in autonomous driving and human-robot interaction scenarios. Earlier studies primarily utilized sufficient observational data to predict future trajectories. However, in real-world scenarios, such as pedestrians suddenly emerging from blind spots, sufficient observational data is often unavailable (i.e. momentary trajectory), making accurate prediction challenging and increasing the risk of traffic accidents. Therefore, advancing research on pedestrian trajectory prediction under extreme scenarios is critical for enhancing traffic safety. In this work, we propose a novel framework termed Diffusion^2, tailored for momentary trajectory prediction. Diffusion^2 consists of two sequentially connected diffusion models: one for backward prediction, which generates unobserved historical trajectories, and the other for forward prediction, which forecasts future trajectories. Given that the generated unobserved historical trajectories may introduce additional noise, we propose a dual-head parameterization mechanism to estimate their aleatoric uncertainty and design a temporally adaptive noise module that dynamically modulates the noise scale in the forward diffusion process. Empirically, Diffusion^2 sets a new state-of-the-art in momentary trajectory prediction on ETH/UCY and Stanford Drone datasets.
Deep Fictitious Play-Based Potential Differential Games for Learning Human-Like Interaction at Unsignalized Intersections
Jun 14, 2025Modeling vehicle interactions at unsignalized intersections is a challenging task due to the complexity of the underlying game-theoretic processes. Although prior studies have attempted to capture interactive driving behaviors, most approaches relied solely on game-theoretic formulations and did not leverage naturalistic driving datasets. In this study, we learn human-like interactive driving policies at unsignalized intersections using Deep Fictitious Play. Specifically, we first model vehicle interactions as a Differential Game, which is then reformulated as a Potential Differential Game. The weights in the cost function are learned from the dataset and capture diverse driving styles. We also demonstrate that our framework provides a theoretical guarantee of convergence to a Nash equilibrium. To the best of our knowledge, this is the first study to train interactive driving policies using Deep Fictitious Play. We validate the effectiveness of our Deep Fictitious Play-Based Potential Differential Game (DFP-PDG) framework using the INTERACTION dataset. The results demonstrate that the proposed framework achieves satisfactory performance in learning human-like driving policies. The learned individual weights effectively capture variations in driver aggressiveness and preferences. Furthermore, the ablation study highlights the importance of each component within our model.
AVstack: An Open-Source, Reconfigurable Platform for Autonomous Vehicle Development
Dec 28, 2022



Pioneers of autonomous vehicles (AVs) promised to revolutionize the driving experience and driving safety. However, milestones in AVs have materialized slower than forecast. Two culprits are (1) the lack of verifiability of proposed state-of-the-art AV components, and (2) stagnation of pursuing next-level evaluations, e.g., vehicle-to-infrastructure (V2I) and multi-agent collaboration. In part, progress has been hampered by: the large volume of software in AVs, the multiple disparate conventions, the difficulty of testing across datasets and simulators, and the inflexibility of state-of-the-art AV components. To address these challenges, we present AVstack, an open-source, reconfigurable software platform for AV design, implementation, test, and analysis. AVstack solves the validation problem by enabling first-of-a-kind trade studies on datasets and physics-based simulators. AVstack solves the stagnation problem as a reconfigurable AV platform built on dozens of open-source AV components in a high-level programming language. We demonstrate the power of AVstack through longitudinal testing across multiple benchmark datasets and V2I-collaboration case studies that explore trade-offs of designing multi-sensor, multi-agent algorithms.