 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisturbance-Free Surgical Video Generation from Multi-Camera Shadowless Lamps for Open Surgery
Dec 09, 2025

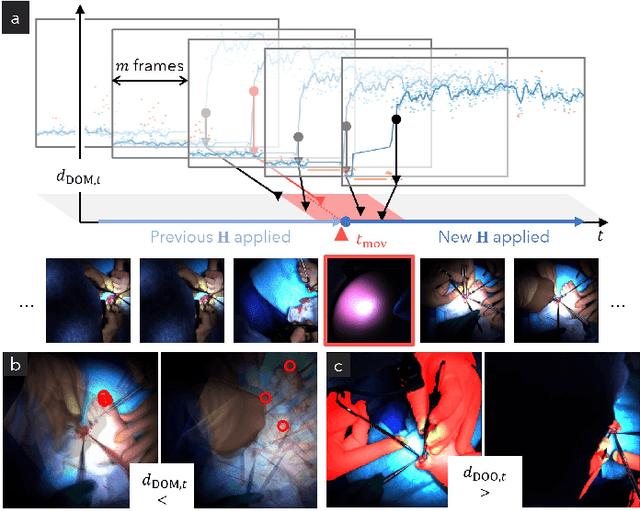

Video recordings of open surgeries are greatly required for education and research purposes. However, capturing unobstructed videos is challenging since surgeons frequently block the camera field of view. To avoid occlusion, the positions and angles of the camera must be frequently adjusted, which is highly labor-intensive. Prior work has addressed this issue by installing multiple cameras on a shadowless lamp and arranging them to fully surround the surgical area. This setup increases the chances of some cameras capturing an unobstructed view. However, manual image alignment is needed in post-processing since camera configurations change every time surgeons move the lamp for optimal lighting. This paper aims to fully automate this alignment task. The proposed method identifies frames in which the lighting system moves, realigns them, and selects the camera with the least occlusion to generate a video that consistently presents the surgical field from a fixed perspective. A user study involving surgeons demonstrated that videos generated by our method were superior to those produced by conventional methods in terms of the ease of confirming the surgical area and the comfort during video viewing. Additionally, our approach showed improvements in video quality over existing techniques. Furthermore, we implemented several synthesis options for the proposed view-synthesis method and conducted a user study to assess surgeons' preferences for each option.
User-in-the-Loop View Sampling with Error Peaking Visualization
Jun 26, 2025



Augmented reality (AR) provides ways to visualize missing view samples for novel view synthesis. Existing approaches present 3D annotations for new view samples and task users with taking images by aligning the AR display. This data collection task is known to be mentally demanding and limits capture areas to pre-defined small areas due to the ideal but restrictive underlying sampling theory. To free users from 3D annotations and limited scene exploration, we propose using locally reconstructed light fields and visualizing errors to be removed by inserting new views. Our results show that the error-peaking visualization is less invasive, reduces disappointment in final results, and is satisfactory with fewer view samples in our mobile view synthesis system. We also show that our approach can contribute to recent radiance field reconstruction for larger scenes, such as 3D Gaussian splatting.
High-Quality Virtual Single-Viewpoint Surgical Video: Geometric Autocalibration of Multiple Cameras in Surgical Lights
Mar 05, 2025Occlusion-free video generation is challenging due to surgeons' obstructions in the camera field of view. Prior work has addressed this issue by installing multiple cameras on a surgical light, hoping some cameras will observe the surgical field with less occlusion. However, this special camera setup poses a new imaging challenge since camera configurations can change every time surgeons move the light, and manual image alignment is required. This paper proposes an algorithm to automate this alignment task. The proposed method detects frames where the lighting system moves, realigns them, and selects the camera with the least occlusion. This algorithm results in a stabilized video with less occlusion. Quantitative results show that our method outperforms conventional approaches. A user study involving medical doctors also confirmed the superiority of our method.
Dense Depth from Event Focal Stack
Dec 11, 2024We propose a method for dense depth estimation from an event stream generated when sweeping the focal plane of the driving lens attached to an event camera. In this method, a depth map is inferred from an ``event focal stack'' composed of the event stream using a convolutional neural network trained with synthesized event focal stacks. The synthesized event stream is created from a focal stack generated by Blender for any arbitrary 3D scene. This allows for training on scenes with diverse structures. Additionally, we explored methods to eliminate the domain gap between real event streams and synthetic event streams. Our method demonstrates superior performance over a depth-from-defocus method in the image domain on synthetic and real datasets.
DeepDR: Deep Structure-Aware RGB-D Inpainting for Diminished Reality
Dec 01, 2023
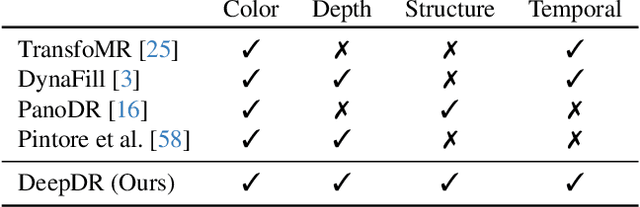

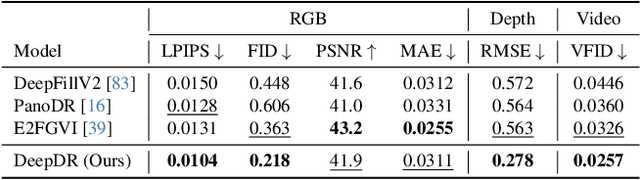
Diminished reality (DR) refers to the removal of real objects from the environment by virtually replacing them with their background. Modern DR frameworks use inpainting to hallucinate unobserved regions. While recent deep learning-based inpainting is promising, the DR use case is complicated by the need to generate coherent structure and 3D geometry (i.e., depth), in particular for advanced applications, such as 3D scene editing. In this paper, we propose DeepDR, a first RGB-D inpainting framework fulfilling all requirements of DR: Plausible image and geometry inpainting with coherent structure, running at real-time frame rates, with minimal temporal artifacts. Our structure-aware generative network allows us to explicitly condition color and depth outputs on the scene semantics, overcoming the difficulty of reconstructing sharp and consistent boundaries in regions with complex backgrounds. Experimental results show that the proposed framework can outperform related work qualitatively and quantitatively.