 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-set Intersection Intention Prediction for Autonomous Driving
Mar 09, 2021
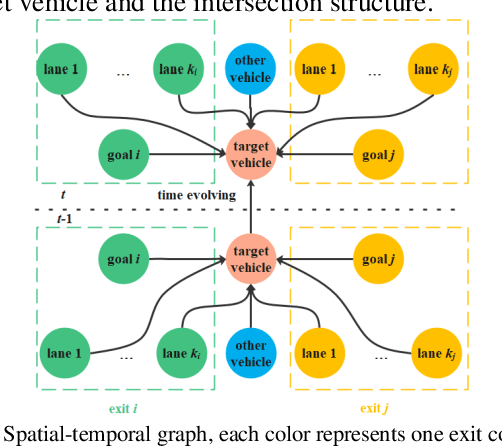
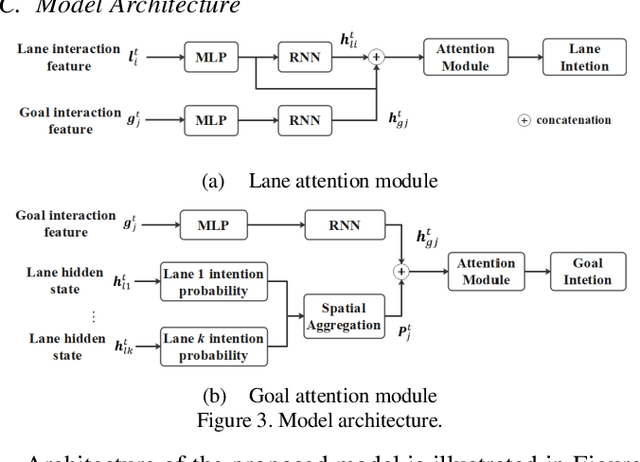
Intention prediction is a crucial task for Autonomous Driving (AD). Due to the variety of size and layout of intersections, it is challenging to predict intention of human driver at different intersections, especially unseen and irregular intersections. In this paper, we formulate the prediction of intention at intersections as an open-set prediction problem that requires context specific matching of the target vehicle state and the diverse intersection configurations that are in principle unbounded. We capture map-centric features that correspond to intersection structures under a spatial-temporal graph representation, and use two MAAMs (mutually auxiliary attention module) that cover respectively lane-level and exitlevel intentions to predict a target that best matches intersection elements in map-centric feature space. Under our model, attention scores estimate the probability distribution of the openset intentions that are contextually defined by the structure of the current intersection. The proposed model is trained and evaluated on simulated dataset. Furthermore, the model, trained on simulated dataset and without any fine tuning, is directly validated on in-house real-world dataset collected at 98 realworld intersections and exhibits satisfactory performance,demonstrating the practical viability of our approach.
Pedestrian Motion State Estimation From 2D Pose
Feb 27, 2021

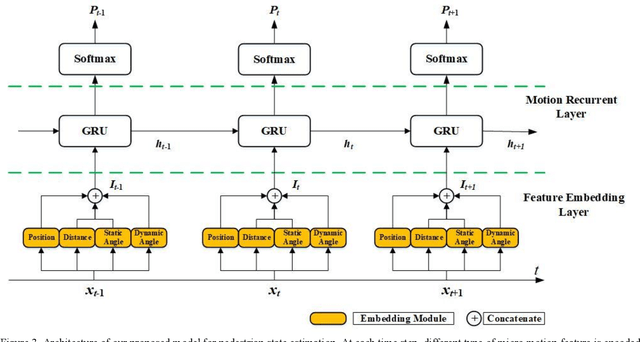

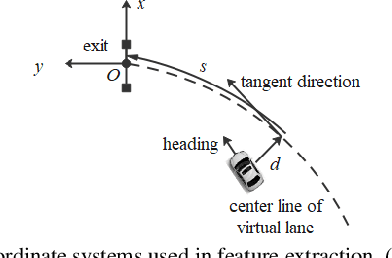
Traffic violation and the flexible and changeable nature of pedestrians make it more difficult to predict pedestrian behavior or intention, which might be a potential safety hazard on the road. Pedestrian motion state (such as walking and standing) directly affects or reflects its intention. In combination with pedestrian motion state and other influencing factors, pedestrian intention can be predicted to avoid unnecessary accidents. In this paper, pedestrian is treated as non-rigid object, which can be represented by a set of two-dimensional key points, and the movement of key point relative to the torso is introduced as micro motion. Static and dynamic micro motion features, such as position, angle and distance, and their differential calculations in time domain, are used to describe its motion pattern. Gated recurrent neural network based seq2seq model is used to learn the dependence of motion state transition on previous information, finally the pedestrian motion state is estimated via a softmax classifier. The proposed method only needs the previous hidden state of GRU and current feature to evaluate the probability of current motion state, and it is computation efficient to deploy on vehicles. This paper verifies the proposed algorithm on the JAAD public dataset, and the accuracy is improved by 11.6% compared with the existing method.
Data Assimilation in the Latent Space of a Neural Network
Dec 22, 2020
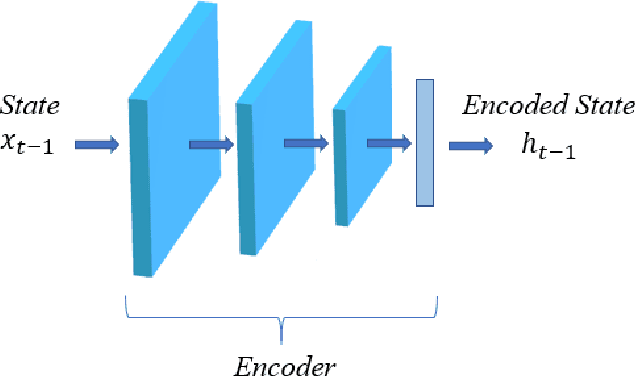
There is an urgent need to build models to tackle Indoor Air Quality issue. Since the model should be accurate and fast, Reduced Order Modelling technique is used to reduce the dimensionality of the problem. The accuracy of the model, that represent a dynamic system, is improved integrating real data coming from sensors using Data Assimilation techniques. In this paper, we formulate a new methodology called Latent Assimilation that combines Data Assimilation and Machine Learning. We use a Convolutional neural network to reduce the dimensionality of the problem, a Long-Short-Term-Memory to build a surrogate model of the dynamic system and an Optimal Interpolated Kalman Filter to incorporate real data. Experimental results are provided for CO2 concentration within an indoor space. This methodology can be used for example to predict in real-time the load of virus, such as the SARS-COV-2, in the air by linking it to the concentration of CO2.