 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttesting Model Lineage by Consisted Knowledge Evolution with Fine-Tuning Trajectory
Jan 16, 2026The fine-tuning technique in deep learning gives rise to an emerging lineage relationship among models. This lineage provides a promising perspective for addressing security concerns such as unauthorized model redistribution and false claim of model provenance, which are particularly pressing in \textcolor{blue}{open-weight model} libraries where robust lineage verification mechanisms are often lacking. Existing approaches to model lineage detection primarily rely on static architectural similarities, which are insufficient to capture the dynamic evolution of knowledge that underlies true lineage relationships. Drawing inspiration from the genetic mechanism of human evolution, we tackle the problem of model lineage attestation by verifying the joint trajectory of knowledge evolution and parameter modification. To this end, we propose a novel model lineage attestation framework. In our framework, model editing is first leveraged to quantify parameter-level changes introduced by fine-tuning. Subsequently, we introduce a novel knowledge vectorization mechanism that refines the evolved knowledge within the edited models into compact representations by the assistance of probe samples. The probing strategies are adapted to different types of model families. These embeddings serve as the foundation for verifying the arithmetic consistency of knowledge relationships across models, thereby enabling robust attestation of model lineage. Extensive experimental evaluations demonstrate the effectiveness and resilience of our approach in a variety of adversarial scenarios in the real world. Our method consistently achieves reliable lineage verification across a broad spectrum of model types, including classifiers, diffusion models, and large language models.
Pedestrian Motion State Estimation From 2D Pose
Feb 27, 2021

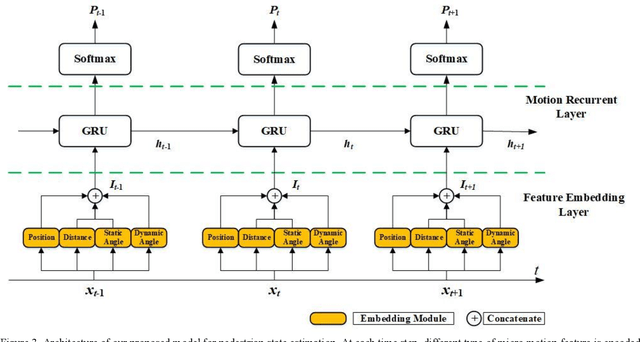

Traffic violation and the flexible and changeable nature of pedestrians make it more difficult to predict pedestrian behavior or intention, which might be a potential safety hazard on the road. Pedestrian motion state (such as walking and standing) directly affects or reflects its intention. In combination with pedestrian motion state and other influencing factors, pedestrian intention can be predicted to avoid unnecessary accidents. In this paper, pedestrian is treated as non-rigid object, which can be represented by a set of two-dimensional key points, and the movement of key point relative to the torso is introduced as micro motion. Static and dynamic micro motion features, such as position, angle and distance, and their differential calculations in time domain, are used to describe its motion pattern. Gated recurrent neural network based seq2seq model is used to learn the dependence of motion state transition on previous information, finally the pedestrian motion state is estimated via a softmax classifier. The proposed method only needs the previous hidden state of GRU and current feature to evaluate the probability of current motion state, and it is computation efficient to deploy on vehicles. This paper verifies the proposed algorithm on the JAAD public dataset, and the accuracy is improved by 11.6% compared with the existing method.