 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Context Shapes Truth: Geometric Transformations of Statement-level Truth Representations in LLMs
Jan 10, 2026Large Language Models (LLMs) often encode whether a statement is true as a vector in their residual stream activations. These vectors, also known as truth vectors, have been studied in prior work, however how they change when context is introduced remains unexplored. We study this question by measuring (1) the directional change ($θ$) between the truth vectors with and without context and (2) the relative magnitude of the truth vectors upon adding context. Across four LLMs and four datasets, we find that (1) truth vectors are roughly orthogonal in early layers, converge in middle layers, and may stabilize or continue increasing in later layers; (2) adding context generally increases the truth vector magnitude, i.e., the separation between true and false representations in the activation space is amplified; (3) larger models distinguish relevant from irrelevant context mainly through directional change ($θ$), while smaller models show this distinction through magnitude differences. We also find that context conflicting with parametric knowledge produces larger geometric changes than parametrically aligned context. To the best of our knowledge, this is the first work that provides a geometric characterization of how context transforms the truth vector in the activation space of LLMs.
SIKeD: Self-guided Iterative Knowledge Distillation for mathematical reasoning
Oct 24, 2024

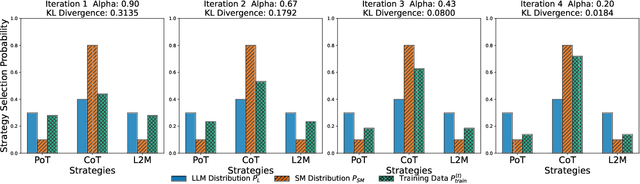

Large Language Models (LLMs) can transfer their reasoning skills to smaller models by teaching them to generate the intermediate reasoning process required to solve multistep reasoning tasks. While LLMs can accurately solve reasoning tasks through a variety of strategies, even without fine-tuning, smaller models are not expressive enough to fit the LLMs distribution on all strategies when distilled and tend to prioritize one strategy over the others. This reliance on one strategy poses a challenge for smaller models when attempting to solve reasoning tasks that may be difficult with their preferred strategy. To address this, we propose a distillation method SIKeD (Self-guided Iterative Knowledge Distillation for mathematical reasoning), where the LLM teaches the smaller model to approach a task using different strategies and the smaller model uses its self-generated on-policy outputs to choose the most suitable strategy for the given task. The training continues in a self-guided iterative manner, where for each training iteration, a decision is made on how to combine the LLM data with the self-generated outputs. Unlike traditional distillation methods, SIKeD allows the smaller model to learn which strategy is suitable for a given task while continuously learning to solve a task using different strategies. Our experiments on various mathematical reasoning datasets show that SIKeD significantly outperforms traditional distillation techniques across smaller models of different sizes. Our code is available at: https://github.com/kumar-shridhar/SIKeD
Microgravity Induces Overconfidence in Perceptual Decision-making
Apr 24, 2023Does gravity affect decision-making? This question comes into sharp focus as plans for interplanetary human space missions solidify. In the framework of Bayesian brain theories, gravity encapsulates a strong prior, anchoring agents to a reference frame via the vestibular system, informing their decisions and possibly their integration of uncertainty. What happens when such a strong prior is altered? We address this question using a self-motion estimation task in a space analog environment under conditions of altered gravity. Two participants were cast as remote drone operators orbiting Mars in a virtual reality environment on board a parabolic flight, where both hyper- and microgravity conditions were induced. From a first-person perspective, participants viewed a drone exiting a cave and had to first predict a collision and then provide a confidence estimate of their response. We evoked uncertainty in the task by manipulating the motion's trajectory angle. Post-decision subjective confidence reports were negatively predicted by stimulus uncertainty, as expected. Uncertainty alone did not impact overt behavioral responses (performance, choice) differentially across gravity conditions. However microgravity predicted higher subjective confidence, especially in interaction with stimulus uncertainty. These results suggest that variables relating to uncertainty affect decision-making distinctly in microgravity, highlighting the possible need for automatized, compensatory mechanisms when considering human factors in space research.