 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMicrogravity Induces Overconfidence in Perceptual Decision-making
Apr 24, 2023Does gravity affect decision-making? This question comes into sharp focus as plans for interplanetary human space missions solidify. In the framework of Bayesian brain theories, gravity encapsulates a strong prior, anchoring agents to a reference frame via the vestibular system, informing their decisions and possibly their integration of uncertainty. What happens when such a strong prior is altered? We address this question using a self-motion estimation task in a space analog environment under conditions of altered gravity. Two participants were cast as remote drone operators orbiting Mars in a virtual reality environment on board a parabolic flight, where both hyper- and microgravity conditions were induced. From a first-person perspective, participants viewed a drone exiting a cave and had to first predict a collision and then provide a confidence estimate of their response. We evoked uncertainty in the task by manipulating the motion's trajectory angle. Post-decision subjective confidence reports were negatively predicted by stimulus uncertainty, as expected. Uncertainty alone did not impact overt behavioral responses (performance, choice) differentially across gravity conditions. However microgravity predicted higher subjective confidence, especially in interaction with stimulus uncertainty. These results suggest that variables relating to uncertainty affect decision-making distinctly in microgravity, highlighting the possible need for automatized, compensatory mechanisms when considering human factors in space research.
Visual Attention Prediction Improves Performance of Autonomous Drone Racing Agents
Jan 10, 2022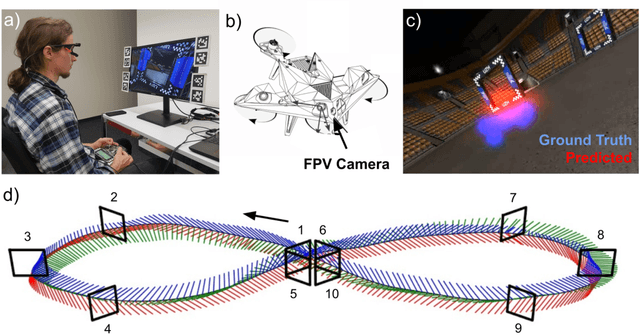

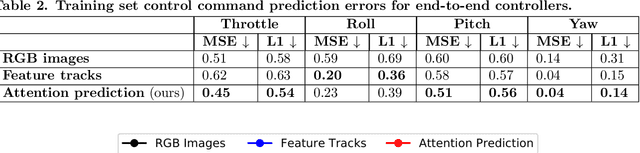
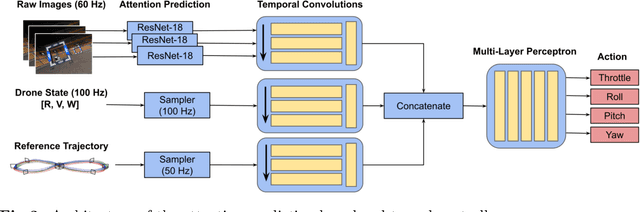
Humans race drones faster than neural networks trained for end-to-end autonomous flight. This may be related to the ability of human pilots to select task-relevant visual information effectively. This work investigates whether neural networks capable of imitating human eye gaze behavior and attention can improve neural network performance for the challenging task of vision-based autonomous drone racing. We hypothesize that gaze-based attention prediction can be an efficient mechanism for visual information selection and decision making in a simulator-based drone racing task. We test this hypothesis using eye gaze and flight trajectory data from 18 human drone pilots to train a visual attention prediction model. We then use this visual attention prediction model to train an end-to-end controller for vision-based autonomous drone racing using imitation learning. We compare the drone racing performance of the attention-prediction controller to those using raw image inputs and image-based abstractions (i.e., feature tracks). Our results show that attention-prediction based controllers outperform the baselines and are able to complete a challenging race track consistently with up to 88% success rate. Furthermore, visual attention-prediction and feature-track based models showed better generalization performance than image-based models when evaluated on hold-out reference trajectories. Our results demonstrate that human visual attention prediction improves the performance of autonomous vision-based drone racing agents and provides an essential step towards vision-based, fast, and agile autonomous flight that eventually can reach and even exceed human performances.
Expertise Affects Drone Racing Performance
Sep 15, 2021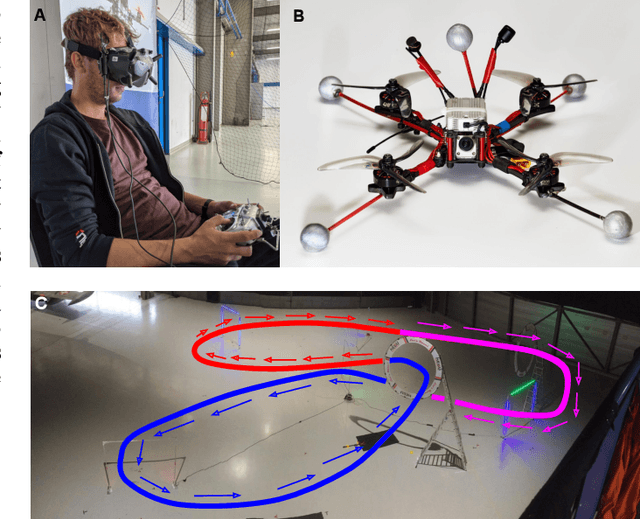
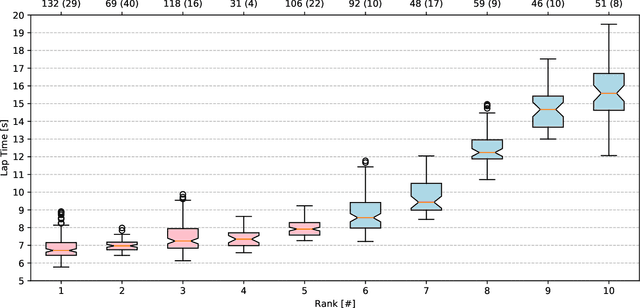

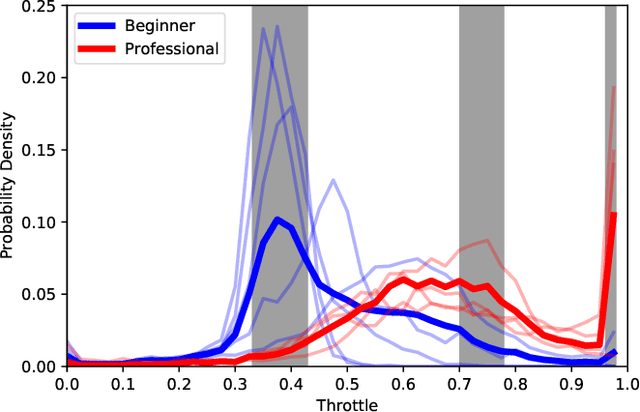
First-person view drone racing has become a popular televised sport. However, very little is known about the perceptual and motor skills of professional drone racing pilots. A better understanding of these skills may inform path planning and control algorithms for autonomous multirotor flight. By using a real-world drone racing track and a large-scale position tracking system, we compare the drone racing performance of five professional and five beginner pilots. Results show that professional pilots consistently outperform beginner pilots by achieving faster lap times, higher velocity, and more efficiently executing the challenging maneuvers. Trajectory analysis shows that experienced pilots choose more optimal racing lines than beginner pilots. Our results provide strong evidence for a contribution of expertise to performances in real-world human-piloted drone racing. We discuss the implications of these results for future work on autonomous fast and agile flight. We make our data openly available.
Human-Piloted Drone Racing: Visual Processing and Control
Mar 08, 2021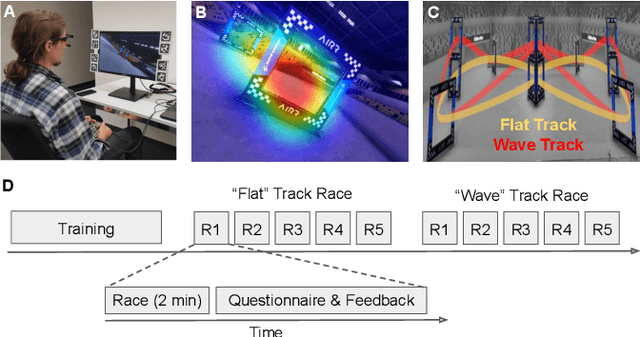
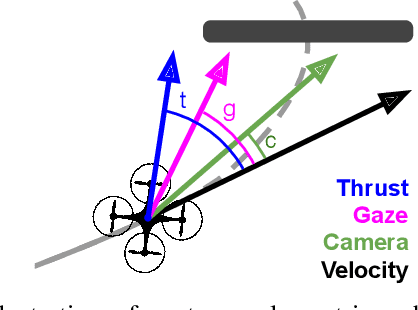
Humans race drones faster than algorithms, despite being limited to a fixed camera angle, body rate control, and response latencies in the order of hundreds of milliseconds. A better understanding of the ability of human pilots of selecting appropriate motor commands from highly dynamic visual information may provide key insights for solving current challenges in vision-based autonomous navigation. This paper investigates the relationship between human eye movements, control behavior, and flight performance in a drone racing task. We collected a multimodal dataset from 21 experienced drone pilots using a highly realistic drone racing simulator, also used to recruit professional pilots. Our results show task-specific improvements in drone racing performance over time. In particular, we found that eye gaze tracks future waypoints (i.e., gates), with first fixations occurring on average 1.5 seconds and 16 meters before reaching the gate. Moreover, human pilots consistently looked at the inside of the future flight path for lateral (i.e., left and right turns) and vertical maneuvers (i.e., ascending and descending). Finally, we found a strong correlation between pilots eye movements and the commanded direction of quadrotor flight, with an average visual-motor response latency of 220 ms. These results highlight the importance of coordinated eye movements in human-piloted drone racing. We make our dataset publicly available.
* 8 pages, 6 figures