 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning General Inventory Management Policy for Large Supply Chain Network
Apr 28, 2022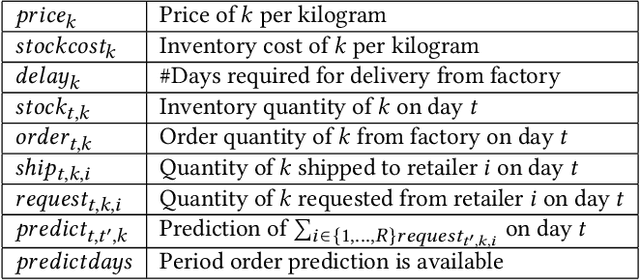

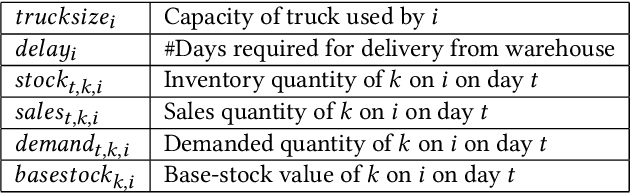
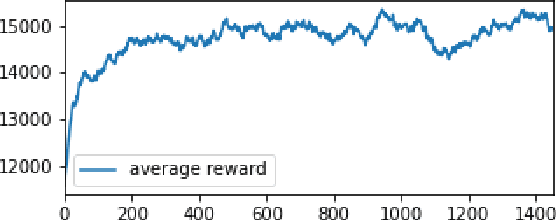
Inventory management in warehouses directly affects profits made by manufacturers. Particularly, large manufacturers produce a very large variety of products that are handled by a significantly large number of retailers. In such a case, the computational complexity of classical inventory management algorithms is inordinately large. In recent years, learning-based approaches have become popular for addressing such problems. However, previous studies have not been managed systems where both the number of products and retailers are large. This study proposes a reinforcement learning-based warehouse inventory management algorithm that can be used for supply chain systems where both the number of products and retailers are large. To solve the computational problem of handling large systems, we provide a means of approximate simulation of the system in the training phase. Our experiments on both real and artificial data demonstrate that our algorithm with approximated simulation can successfully handle large supply chain networks.
Discovering Avoidable Planner Failures of Autonomous Vehicles using Counterfactual Analysis in Behaviorally Diverse Simulation
Nov 24, 2020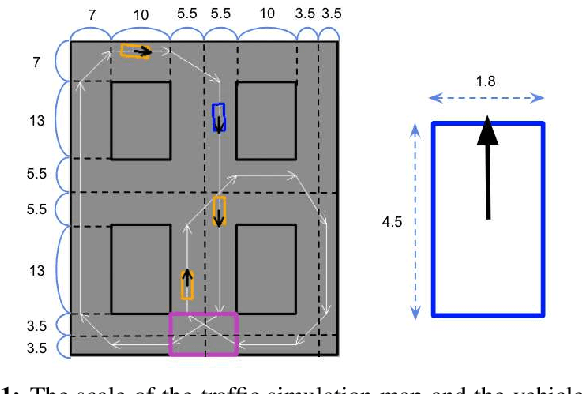
Automated Vehicles require exhaustive testing in simulation to detect as many safety-critical failures as possible before deployment on public roads. In this work, we focus on the core decision-making component of autonomous robots: their planning algorithm. We introduce a planner testing framework that leverages recent progress in simulating behaviorally diverse traffic participants. Using large scale search, we generate, detect, and characterize dynamic scenarios leading to collisions. In particular, we propose methods to distinguish between unavoidable and avoidable accidents, focusing especially on automatically finding planner-specific defects that must be corrected before deployment. Through experiments in complex multi-agent intersection scenarios, we show that our method can indeed find a wide range of critical planner failures.
* 8 pages, 8 figures
Behaviorally Diverse Traffic Simulation via Reinforcement Learning
Nov 11, 2020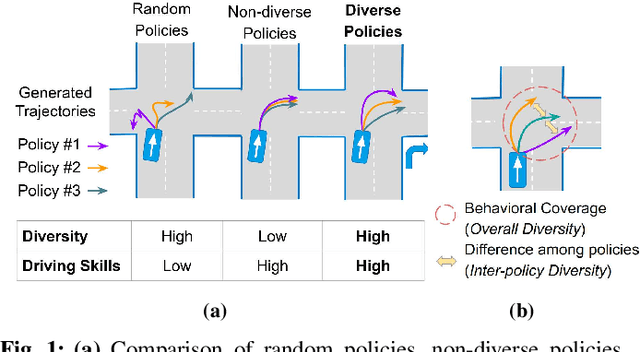


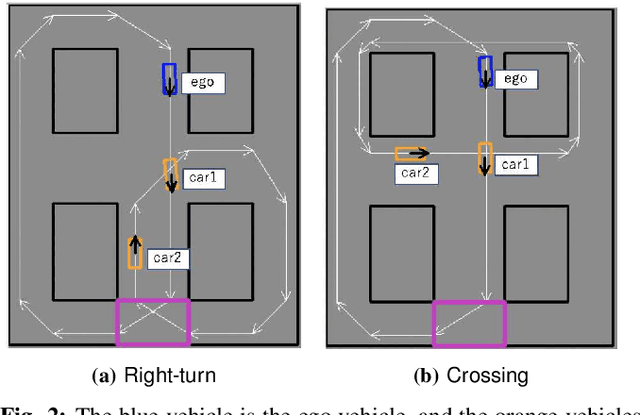
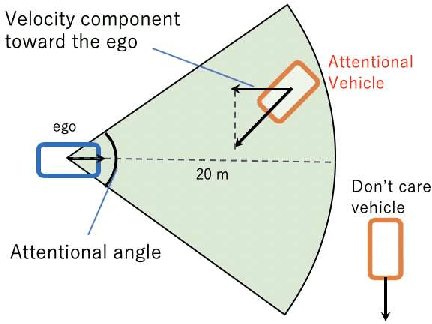
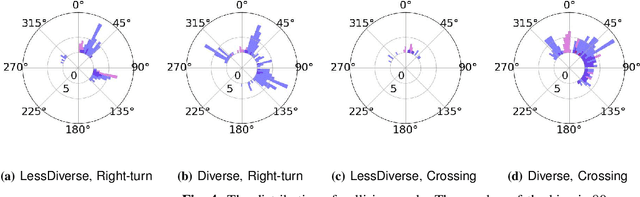
Traffic simulators are important tools in autonomous driving development. While continuous progress has been made to provide developers more options for modeling various traffic participants, tuning these models to increase their behavioral diversity while maintaining quality is often very challenging. This paper introduces an easily-tunable policy generation algorithm for autonomous driving agents. The proposed algorithm balances diversity and driving skills by leveraging the representation and exploration abilities of deep reinforcement learning via a distinct policy set selector. Moreover, we present an algorithm utilizing intrinsic rewards to widen behavioral differences in the training. To provide quantitative assessments, we develop two trajectory-based evaluation metrics which measure the differences among policies and behavioral coverage. We experimentally show the effectiveness of our methods on several challenging intersection scenes.
* 8 pages, 16 figures