 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredict the Rover Mobility over Soft Terrain using Articulated Wheeled Bevameter
Feb 17, 2022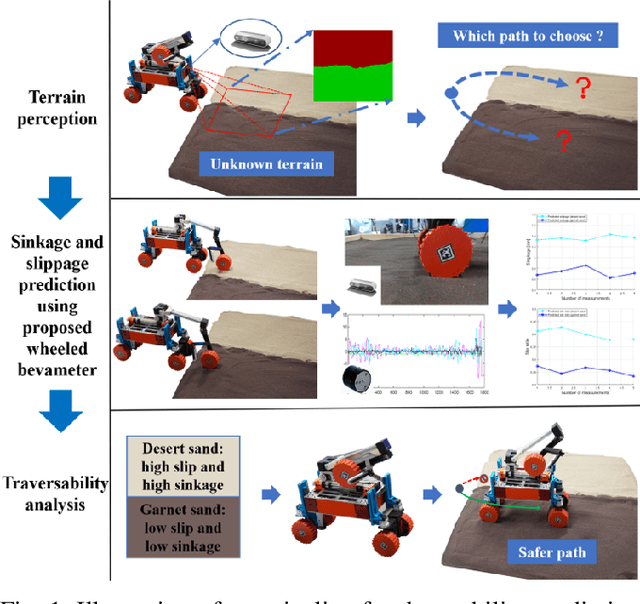
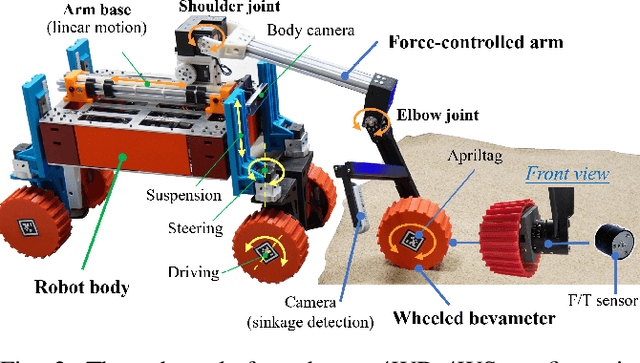
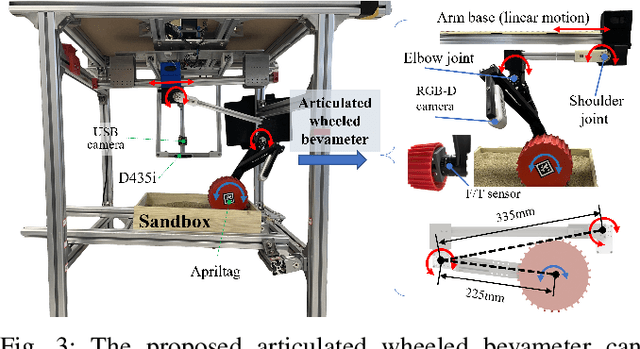
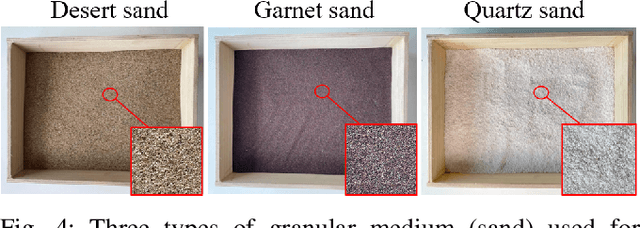
Robot mobility is critical for mission success, especially in soft or deformable terrains, where the complex wheel-soil interaction mechanics often leads to excessive wheel slip and sinkage, causing the eventual mission failure. To improve the success rate, online mobility prediction using vision, infrared imaging, or model-based stochastic methods have been used in the literature. This paper proposes an on-board mobility prediction approach using an articulated wheeled bevameter that consists of a force-controlled arm and an instrumented bevameter (with force and vision sensors) as its end-effector. The proposed bevameter, which emulates the traditional terramechanics tests such as pressure-sinkage and shear experiments, can measure contact parameters ahead of the rover's body in real-time, and predict the slip and sinkage of supporting wheels over the probed region. Based on the predicted mobility, the rover can select a safer path in order to avoid dangerous regions such as those covered with quicksand. Compared to the literature, our proposed method can avoid the complicated terramechanics modeling and time-consuming stochastic prediction; it can also mitigate the inaccuracy issues arising in non-contact vision-based methods. We also conduct multiple experiments to validate the proposed approach.