 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Game Theoretical Error-Correction Framework for Secure Traffic-Sign Classification
Jan 30, 2019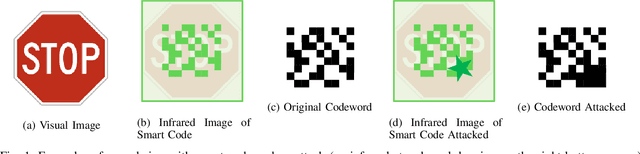
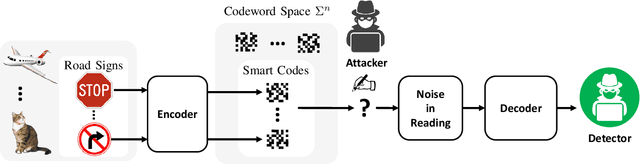
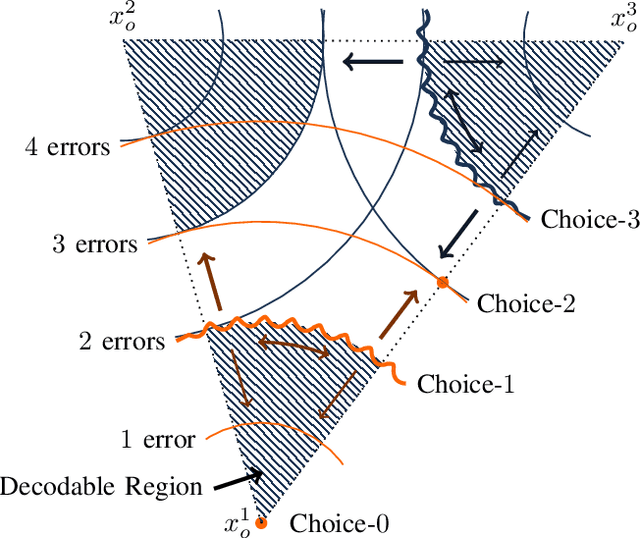
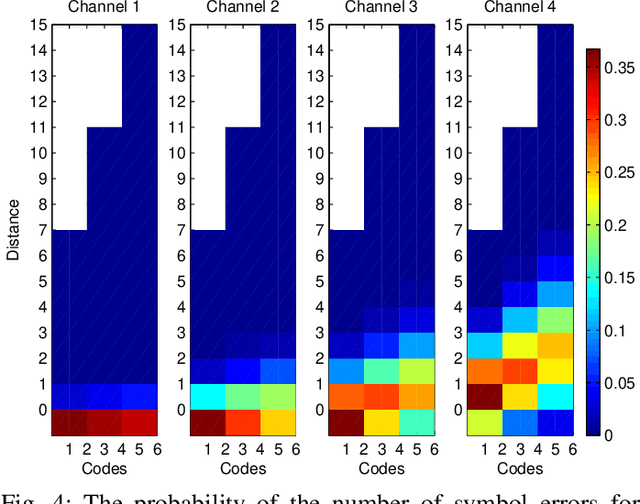
We introduce a game theoretical error-correction framework to design classification algorithms that are reliable even in adversarial environments, with a specific focus on traffic-sign classification. Machine learning algorithms possess inherent vulnerabilities against maliciously crafted inputs especially at high dimensional input spaces. We seek to achieve reliable and timely performance in classification by redesigning the input space physically to significantly lower dimensions. Traffic-sign classification is an important use-case enabling the redesign of the inputs since traffic-signs have already been designed for their easy recognition by human drivers. We encode the original input samples to, e.g., strings of bits, through error-correction methods that can provide certain distance guarantees in-between any two different encoded inputs. And we model the interaction between the defense and the adversary as a game. Then, we analyze the underlying game using the concept of hierarchical equilibrium, where the defense strategies are designed by taking into account the best possible attack against them. At large scale, for computational simplicity, we provide an approximate solution, where we transform the problem into an efficient linear program with substantially small size compared to the original size of the entire input space. Finally, we examine the performance of the proposed scheme over different traffic-sign classification scenarios.
Reliable Intersection Control in Non-cooperative Environments
Feb 22, 2018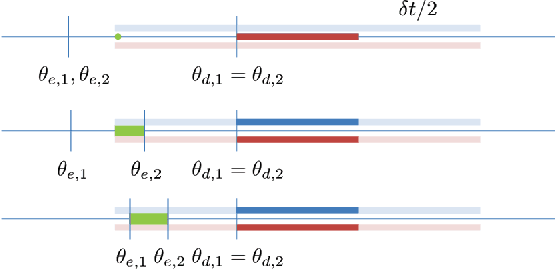
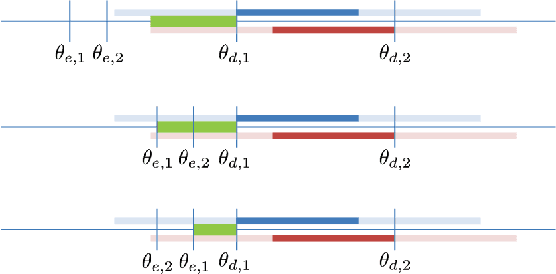
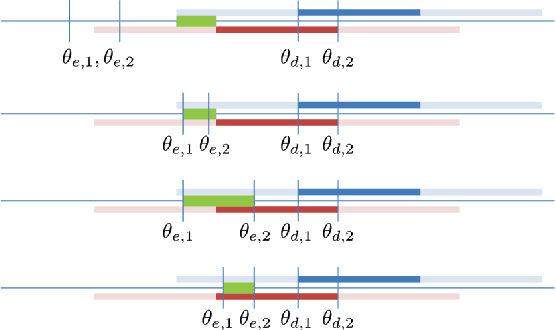
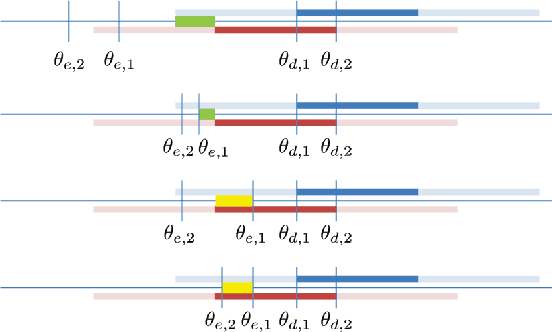
We propose a reliable intersection control mechanism for strategic autonomous and connected vehicles (agents) in non-cooperative environments. Each agent has access to his/her earliest possible and desired passing times, and reports a passing time to the intersection manager, who allocates the intersection temporally to the agents in a First-Come-First-Serve basis. However, the agents might have conflicting interests and can take actions strategically. To this end, we analyze the strategic behaviors of the agents and formulate Nash equilibria for all possible scenarios. Furthermore, among all Nash equilibria we identify a socially optimal equilibrium that leads to a fair intersection allocation, and correspondingly we describe a strategy-proof intersection mechanism, which achieves reliable intersection control such that the strategic agents do not have any incentive to misreport their passing times strategically.