 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Mutual Adaptation of Deep Depth Prediction and Visual SLAM
Nov 27, 2021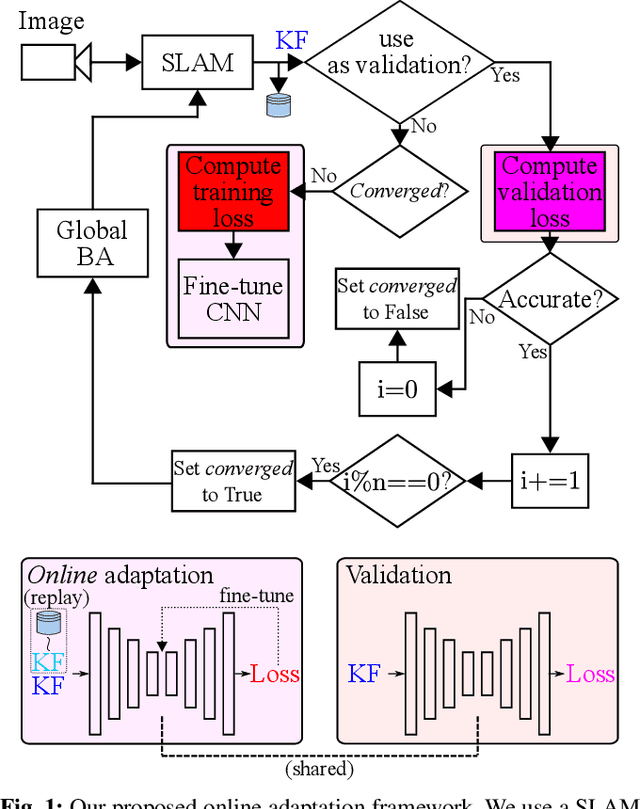
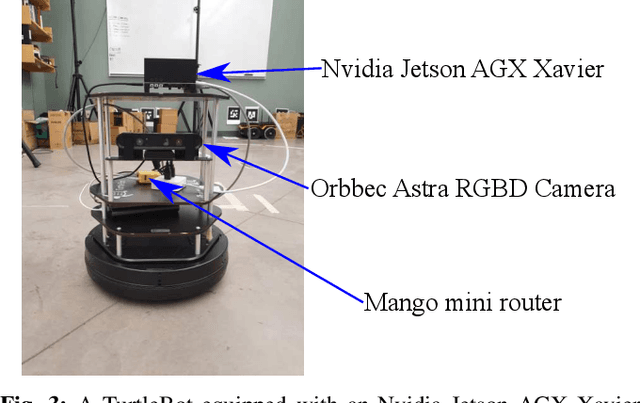

The ability of accurate depth prediction by a CNN is a major challenge for its wide use in practical visual SLAM applications, such as enhanced camera tracking and dense mapping. This paper is set out to answer the following question: Can we tune a depth prediction CNN with the help of a visual SLAM algorithm even if the CNN is not trained for the current operating environment in order to benefit the SLAM performance? To this end, we propose a novel online adaptation framework consisting of two complementary processes: a SLAM algorithm that is used to generate keyframes to fine-tune the depth prediction and another algorithm that uses the online adapted depth to improve map quality. Once the potential noisy map points are removed, we perform global photometric bundle adjustment (BA) to improve the overall SLAM performance. Experimental results on both benchmark datasets and a real robot in our own experimental environments show that our proposed method improves the overall SLAM accuracy. We demonstrate the use of regularization in the training loss as an effective means to prevent catastrophic forgetting. In addition, we compare our online adaptation framework against the state-of-the-art pre-trained depth prediction CNNs to show that our online adapted depth prediction CNN outperforms the depth prediction CNNs that have been trained on a large collection of datasets.
Polarimetric Monocular Dense Mapping Using Relative Deep Depth Prior
Feb 10, 2021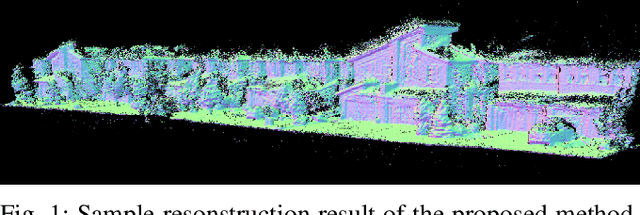

This paper is concerned with polarimetric dense map reconstruction based on a polarization camera with the help of relative depth information as a prior. In general, polarization imaging is able to reveal information about surface normal such as azimuth and zenith angles, which can support the development of solutions to the problem of dense reconstruction, especially in texture-poor regions. However, polarimetric shape cues are ambiguous due to two types of polarized reflection (specular/diffuse). Although methods have been proposed to address this issue, they either are offline and therefore not practical in robotics applications, or use incomplete polarimetric cues, leading to sub-optimal performance. In this paper, we propose an online reconstruction method that uses full polarimetric cues available from the polarization camera. With our online method, we can propagate sparse depth values both along and perpendicular to iso-depth contours. Through comprehensive experiments on challenging image sequences, we demonstrate that our method is able to significantly improve the accuracy of the depthmap as well as increase its density, specially in regions of poor texture.
DeepRelativeFusion: Dense Monocular SLAM using Single-Image Relative Depth Prediction
Jun 07, 2020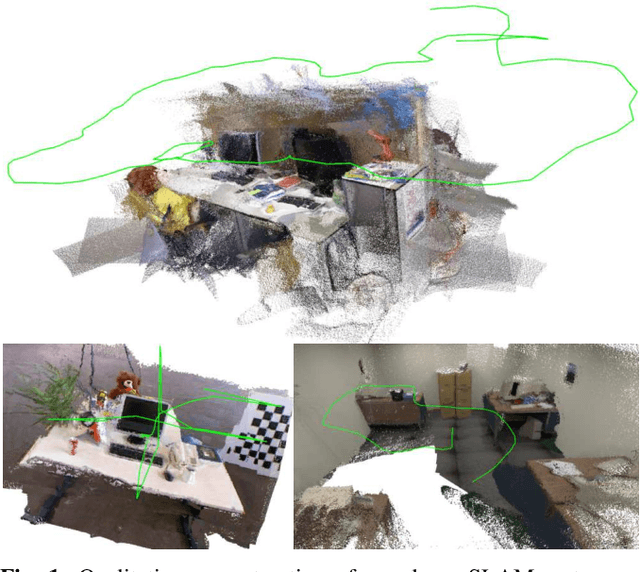
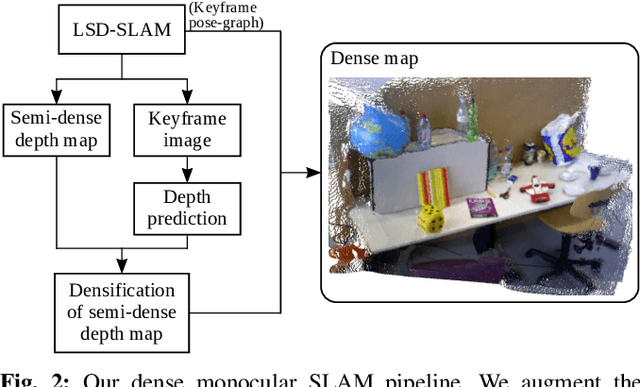

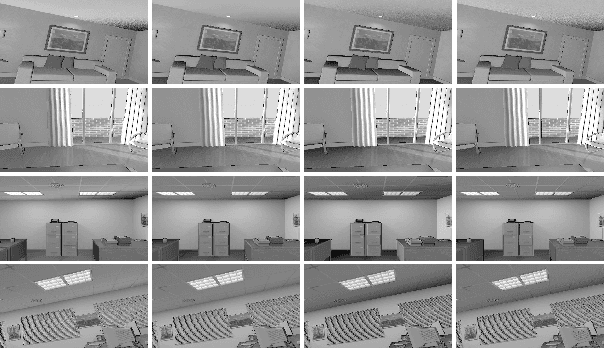
Traditional monocular visual simultaneous localization and mapping (SLAM) algorithms have been extensively studied and proven to reliably recover a sparse structure and camera motion. Nevertheless, the sparse structure is still insufficient for scene interaction, e.g., visual navigation and augmented reality applications. To densify the scene reconstruction, the use of single-image absolute depth prediction from convolutional neural networks (CNNs) for filling in the missing structure has been proposed. However, the prediction accuracy tends to not generalize well on scenes that are different from the training datasets. In this paper, we propose a dense monocular SLAM system, named DeepRelativeFusion, that is capable to recover a globally consistent 3D structure. To this end, we use a visual SLAM algorithm to reliably recover the camera poses and semi-dense depth maps of the keyframes, and then combine the keyframe pose-graph with the densified keyframe depth maps to reconstruct the scene. To perform the densification, we introduce two incremental improvements upon the energy minimization framework proposed by DeepFusion: (1) an additional image gradient term in the cost function, and (2) the use of single-image relative depth prediction. Despite the absence of absolute scale and depth range, the relative depth maps can be corrected using their respective semi-dense depth maps from the SLAM algorithm. We show that the corrected relative depth maps are sufficiently accurate to be used as priors for the densification. To demonstrate the generalizability of relative depth prediction, we illustrate qualitatively the dense reconstruction on two outdoor sequences. Our system also outperforms the state-of-the-art dense SLAM systems quantitatively in dense reconstruction accuracy by a large margin.
Semi-Supervised Monocular Depth Estimation with Left-Right Consistency Using Deep Neural Network
May 18, 2019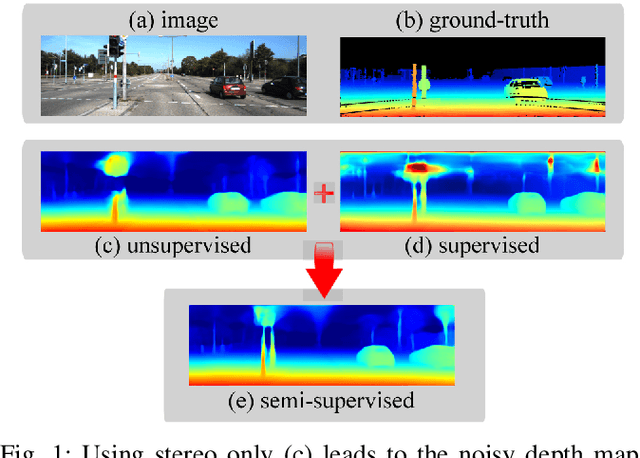
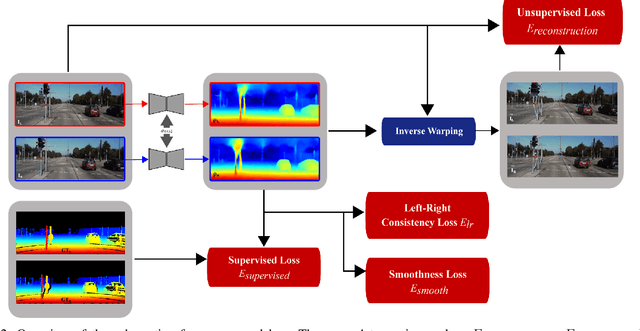
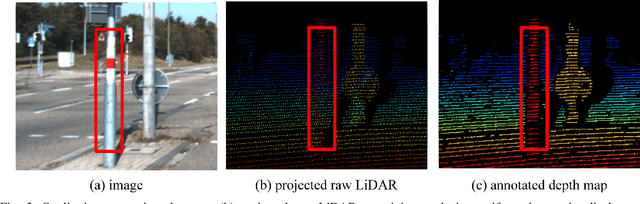
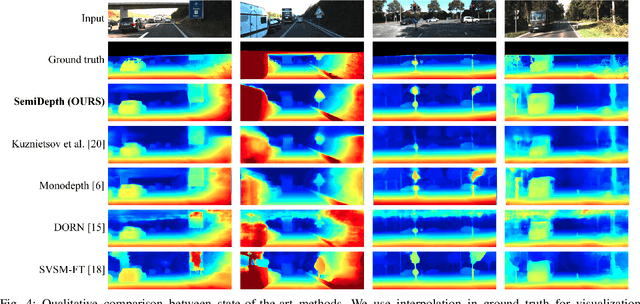
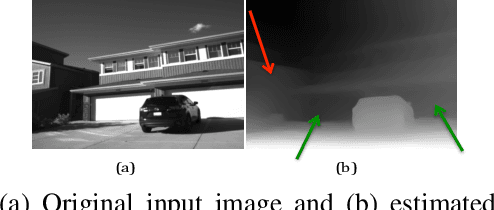
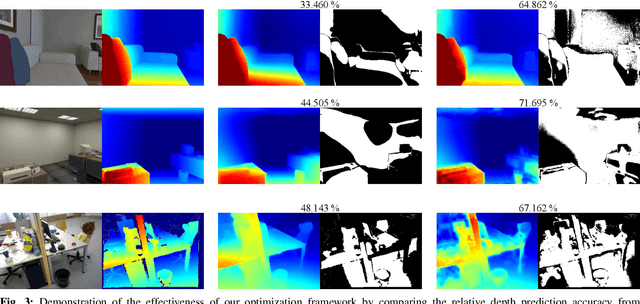
There has been tremendous research progress in estimating the depth of a scene from a monocular camera image. Existing methods for single-image depth prediction are exclusively based on deep neural networks, and their training can be unsupervised using stereo image pairs, supervised using LiDAR point clouds, or semi-supervised using both stereo and LiDAR. In general, semi-supervised training is preferred as it does not suffer from the weaknesses of either supervised training, resulting from the difference in the cameras and the LiDARs field of view, or unsupervised training, resulting from the poor depth accuracy that can be recovered from a stereo pair. In this paper, we present our research in single image depth prediction using semi-supervised training that outperforms the state-of-the-art. We achieve this through a loss function that explicitly exploits left-right consistency in a stereo reconstruction, which has not been adopted in previous semi-supervised training. In addition, we describe the correct use of ground truth depth derived from LiDAR that can significantly reduce prediction error. The performance of our depth prediction model is evaluated on popular datasets, and the importance of each aspect of our semi-supervised training approach is demonstrated through experimental results. Our deep neural network model has been made publicly available.
CNN-SVO: Improving the Mapping in Semi-Direct Visual Odometry Using Single-Image Depth Prediction
Oct 01, 2018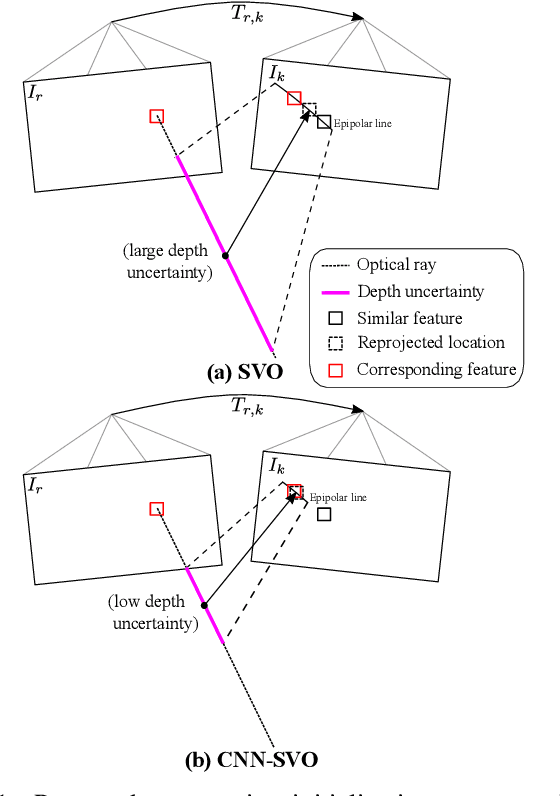
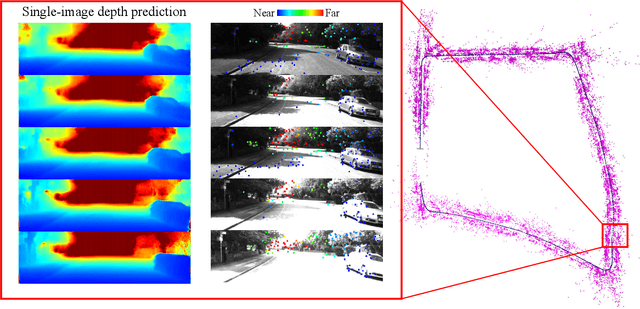
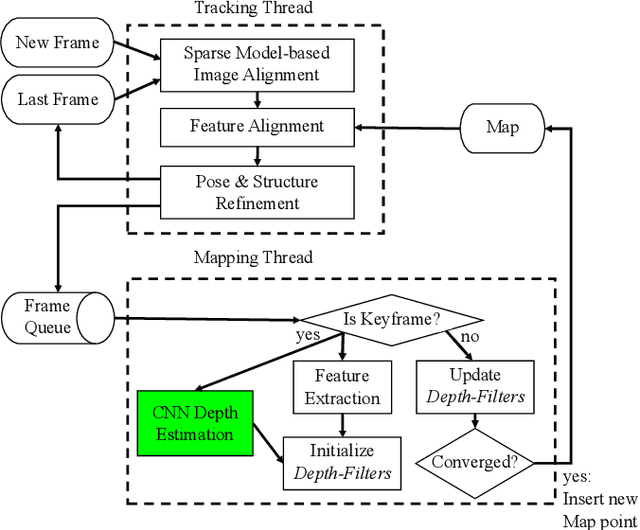
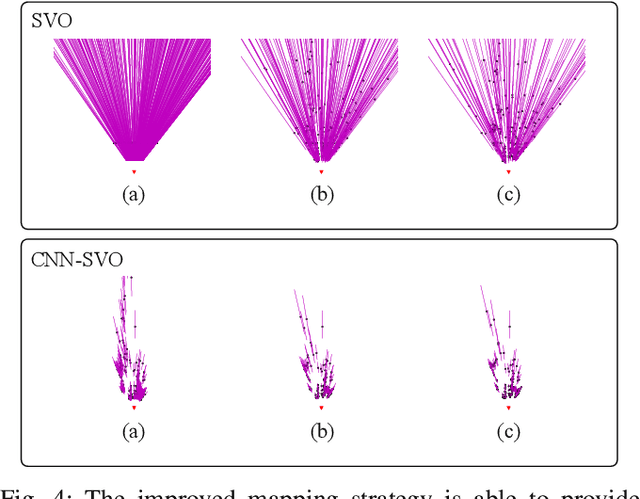
Reliable feature correspondence between frames is a critical step in visual odometry (VO) and visual simultaneous localization and mapping (V-SLAM) algorithms. In comparison with existing VO and V-SLAM algorithms, semi-direct visual odometry (SVO) has two main advantages that lead to state-of-the-art frame rate camera motion estimation: direct pixel correspondence and efficient implementation of probabilistic mapping method. This paper improves the SVO mapping by initializing the mean and the variance of the depth at a feature location according to the depth prediction from a single-image depth prediction network. By significantly reducing the depth uncertainty of the initialized map point (i.e., small variance centred about the depth prediction), the benefits are twofold: reliable feature correspondence between views and fast convergence to the true depth in order to create new map points. We evaluate our method with two outdoor datasets: KITTI dataset and Oxford Robotcar dataset. The experimental results indicate that the improved SVO mapping results in increased robustness and camera tracking accuracy.