 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Agnostic 3D Lifting in Space and Time
Dec 02, 2024



We present a spatio-temporal perspective on category-agnostic 3D lifting of 2D keypoints over a temporal sequence. Our approach differs from existing state-of-the-art methods that are either: (i) object agnostic, but can only operate on individual frames, or (ii) can model space-time dependencies, but are only designed to work with a single object category. Our approach is grounded in two core principles. First, when there is a lack of data about an object, general information from similar objects can be leveraged for better performance. Second, while temporal information is important, the most critical information is in immediate temporal proximity. These two principles allow us to outperform current state-of-the-art methods on per-frame and per-sequence metrics for a variety of objects. Lastly, we release a new synthetic dataset containing 3D skeletons and motion sequences of a diverse set animals. Dataset and code will be made publicly available.
Resolving Marker Pose Ambiguity by Robust Rotation Averaging with Clique Constraints
Sep 26, 2019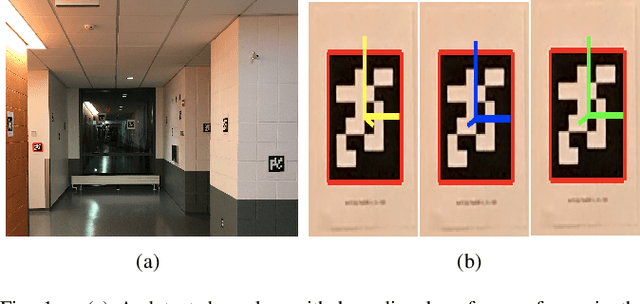
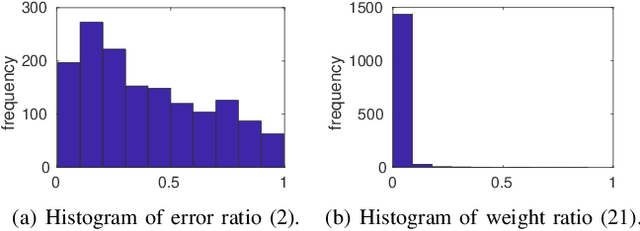
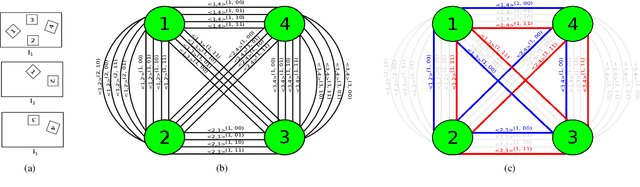

Planar markers are useful in robotics and computer vision for mapping and localisation. Given a detected marker in an image, a frequent task is to estimate the 6DOF pose of the marker relative to the camera, which is an instance of planar pose estimation (PPE). Although there are mature techniques, PPE suffers from a fundamental ambiguity problem, in that there can be more than one plausible pose solutions for a PPE instance. Especially when localisation of the marker corners is noisy, it is often difficult to disambiguate the pose solutions based on reprojection error alone. Previous methods choose between the possible solutions using a heuristic criteria, or simply ignore ambiguous markers. We propose to resolve the ambiguities by examining the consistencies of a set of markers across multiple views. Our specific contributions include a novel rotation averaging formulation that incorporates long-range dependencies between possible marker orientation solutions that arise from PPE ambiguities. We analyse the combinatorial complexity of the problem, and develop a novel lifted algorithm to effectively resolve marker pose ambiguities, without discarding any marker observations. Results on real and synthetic data show that our method is able to handle highly ambiguous inputs, and provides more accurate and/or complete marker-based mapping and localisation.