 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCFR-p: Counterfactual Regret Minimization with Hierarchical Policy Abstraction, and its Application to Two-player Mahjong
Jul 22, 2023Counterfactual Regret Minimization(CFR) has shown its success in Texas Hold'em poker. We apply this algorithm to another popular incomplete information game, Mahjong. Compared to the poker game, Mahjong is much more complex with many variants. We study two-player Mahjong by conducting game theoretical analysis and making a hierarchical abstraction to CFR based on winning policies. This framework can be generalized to other imperfect information games.
Real-time Soft Robot 3D Proprioception via Deep Vision-based Sensing
Apr 08, 2019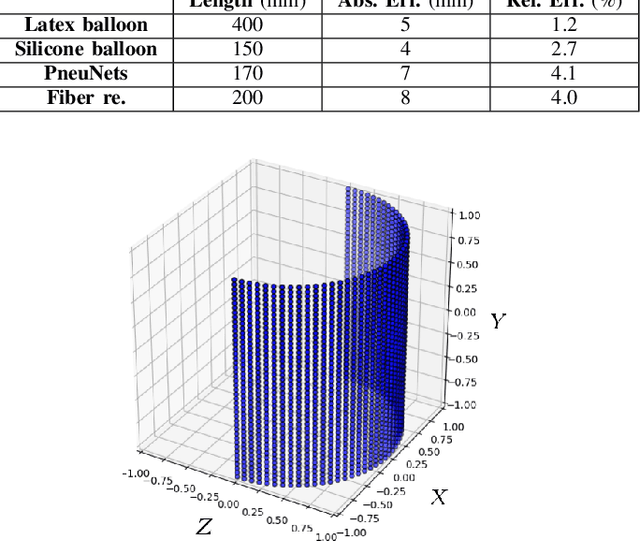

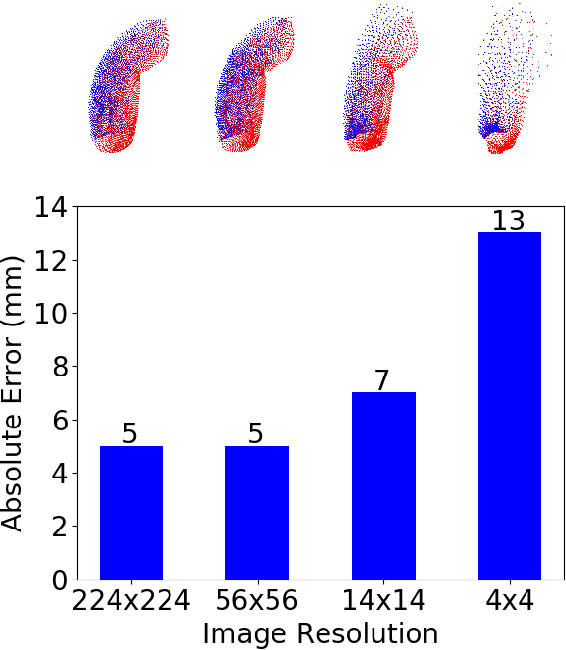
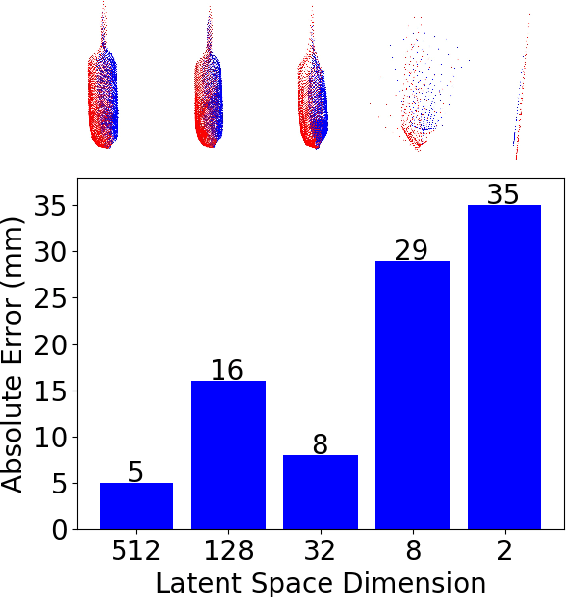
The soft robots are welcomed in many robotic applications because of their high flexibility, which also poses a long-standing challenge on their proprioception, or measuring the real-time 3D shapes of the soft robots from internal sensors. The challenge exists in both the sensor design and robot modeling. In this paper, we propose a framework to measure the real-time high-resolution 3D shapes of soft robots. The framework is based on an embedded camera to capture the inside/outside patterns of the robots under different loading conditions, and a CNN to produce a latent code representing the robot state, which can then be used to reconstruct the 3D shape using a neural network improved from FoldingNet. We tested the framework on four different soft actuators with various kinds of deformations, and achieved real-time computation ($<$2ms/frame) for robust shape estimation of high precision ($<$5% relative error for 2025 points) at an arbitrary resolution. We believe the method could be widely applied to different designs of soft robots for proprioception, and enabling people to better control them under complicated environments. Our code is available at https://ai4ce.github.io/Deep-Soft-Prorioception/.