 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaMorph: Unified Motion Retargeting via Embodiment-Aware Adaptive Transformers
Jan 12, 2026Retargeting human motion to heterogeneous robots is a fundamental challenge in robotics, primarily due to the severe kinematic and dynamic discrepancies between varying embodiments. Existing solutions typically resort to training embodiment-specific models, which scales poorly and fails to exploit shared motion semantics. To address this, we present AdaMorph, a unified neural retargeting framework that enables a single model to adapt human motion to diverse robot morphologies. Our approach treats retargeting as a conditional generation task. We map human motion into a morphology-agnostic latent intent space and utilize a dual-purpose prompting mechanism to condition the generation. Instead of simple input concatenation, we leverage Adaptive Layer Normalization (AdaLN) to dynamically modulate the decoder's feature space based on embodiment constraints. Furthermore, we enforce physical plausibility through a curriculum-based training objective that ensures orientation and trajectory consistency via integration. Experimental results on 12 distinct humanoid robots demonstrate that AdaMorph effectively unifies control across heterogeneous topologies, exhibiting strong zero-shot generalization to unseen complex motions while preserving the dynamic essence of the source behaviors.
A Federated Parameter Aggregation Method for Node Classification Tasks with Different Graph Network Structures
Mar 24, 2024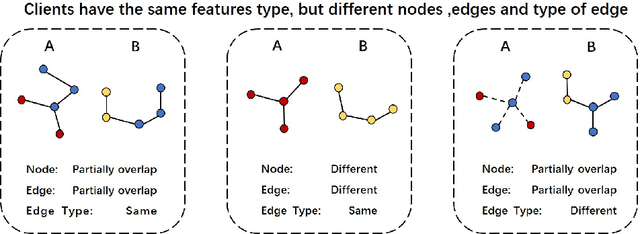
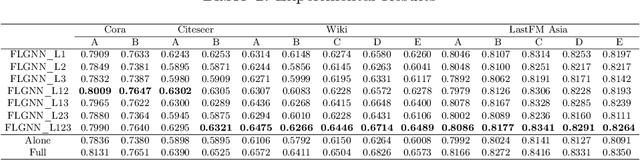
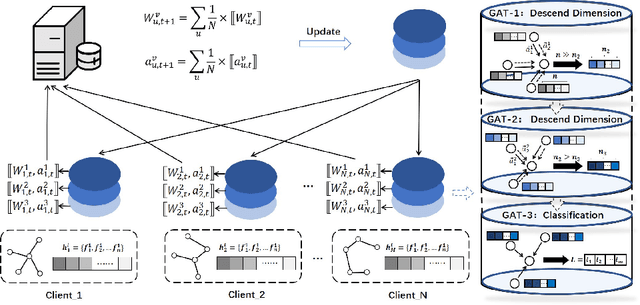
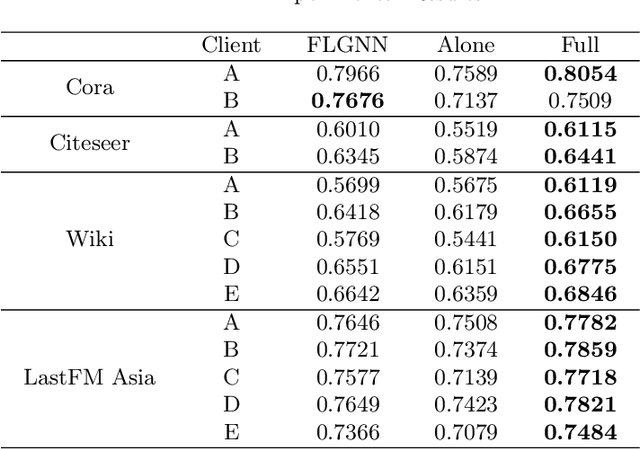
Over the past few years, federated learning has become widely used in various classical machine learning fields because of its collaborative ability to train data from multiple sources without compromising privacy. However, in the area of graph neural networks, the nodes and network structures of graphs held by clients are different in many practical applications, and the aggregation method that directly shares model gradients cannot be directly applied to this scenario. Therefore, this work proposes a federated aggregation method FLGNN applied to various graph federation scenarios and investigates the aggregation effect of parameter sharing at each layer of the graph neural network model. The effectiveness of the federated aggregation method FLGNN is verified by experiments on real datasets. Additionally, for the privacy security of FLGNN, this paper designs membership inference attack experiments and differential privacy defense experiments. The results show that FLGNN performs good robustness, and the success rate of privacy theft is further reduced by adding differential privacy defense methods.