 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePre-scaling and Codebook Design for Joint Radar and Communication Based on Index Modulation
Nov 20, 2021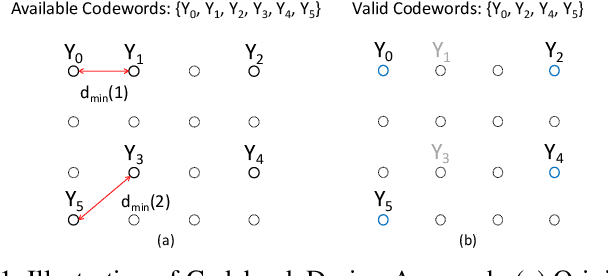
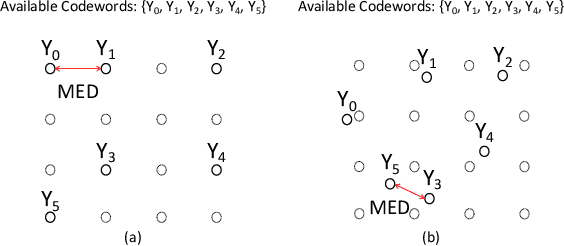
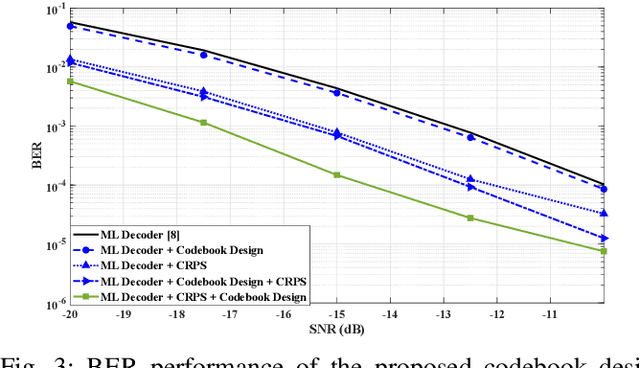
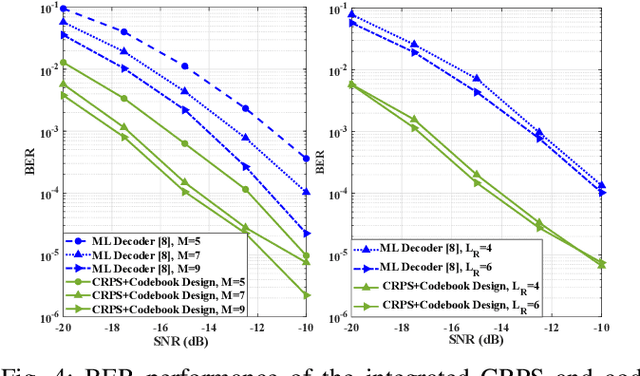
This paper develops an efficient index modulation (IM) approach for the joint radar-communication (JRC) system based on a multi-carrier multiple-input multiple-output (MIMO) radar. The communication information is embedded into the transmitted radar pulses by selecting the corresponding indices of the carrier frequencies and antenna allocations, providing two degrees of freedom. Our contribution involves the development of a novel codebook based minimum Euclidean distance (MED) maximization and a constellation randomization pre-scaling (CRPS) scheme for efficient IM-JRC transmission. It can be inferred that the IM approach integrating the CRPS scheme followed by the codebook design maximizes the signal-to-noise ratio gain. The numerical results support the effectiveness of the proposed approach and show enhanced bit error rate performance when compared to the existing baseline.
A Fast Planning Approach for 3D Short Trajectory with a Parallel Framework
Oct 20, 2021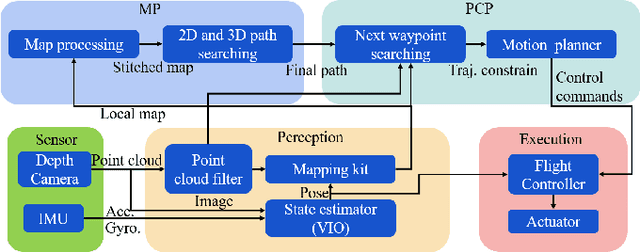
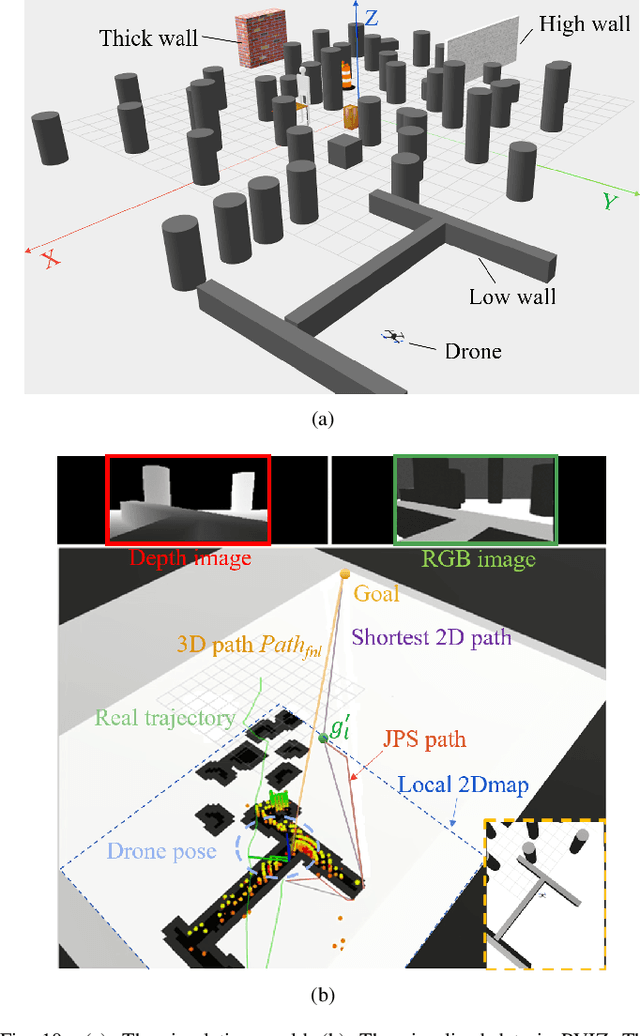
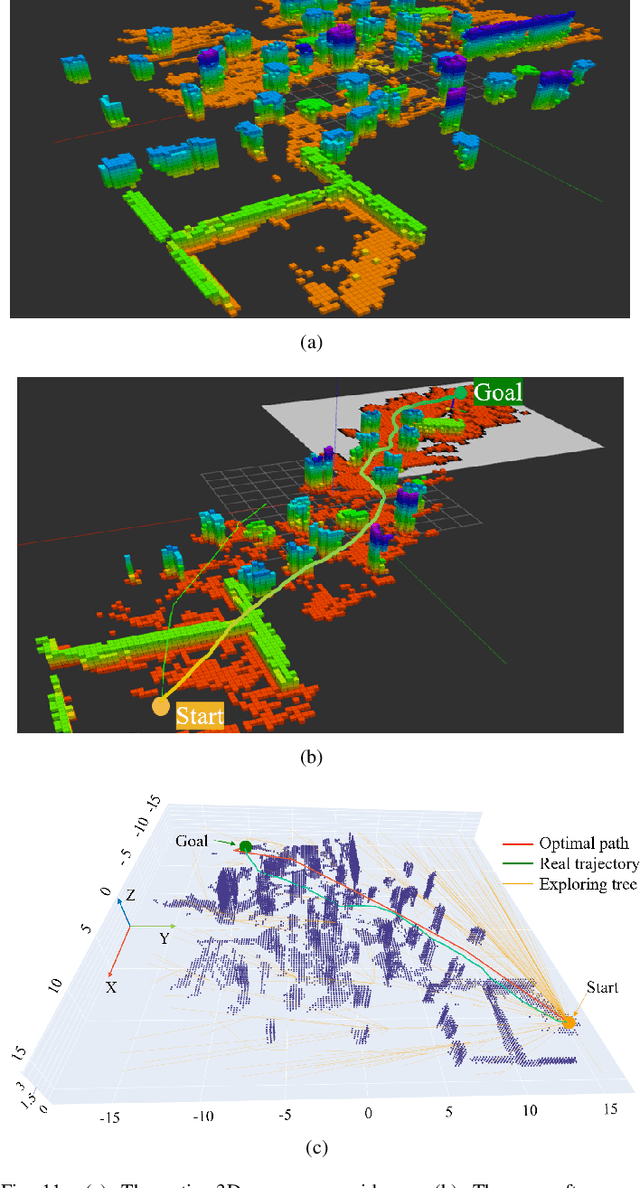
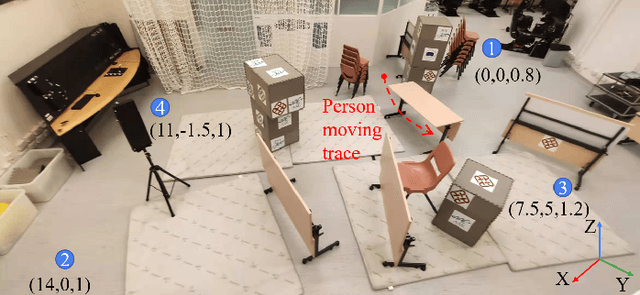
For real applications of unmanned aerial vehicles, the capability of navigating with full autonomy in unknown environments is a crucial requirement. However, planning a shorter path with less computing time is contradictory. To address this problem, we present a framework with the map planner and point cloud planner running in parallel in this paper. The map planner determines the initial path using the improved jump point search method on the 2D map, and then it tries to optimize the path by considering a possible shorter 3D path. The point cloud planner is executed at a high frequency to generate the motion primitives. It makes the drone follow the solved path and avoid the suddenly appearing obstacles nearby. Thus, vehicles can achieve a short trajectory while reacting quickly to the intruding obstacles. We demonstrate fully autonomous quadrotor flight tests in unknown and complex environments with static and dynamic obstacles to validate the proposed method. In simulation and hardware experiments, the proposed framework shows satisfactorily comprehensive performance.
Stereo Visual Inertial Pose Estimation Based on Feedforward-Feedback Loops
Jul 13, 2020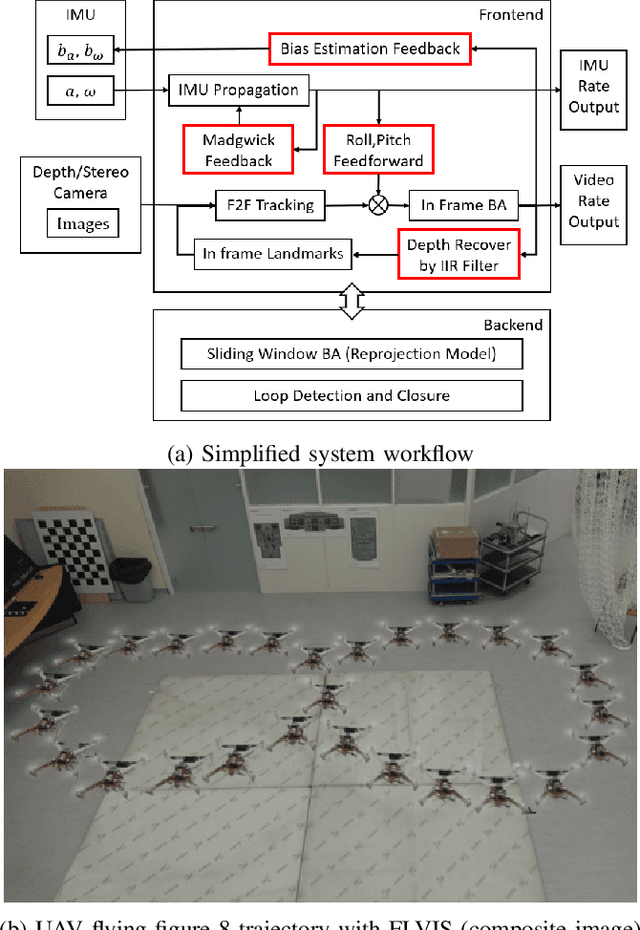
In this paper, we present a novel stereo visual inertial pose estimation method. Compared to the widely used filter-based or optimization-based approaches, the pose estimation process is modeled as a control system. Designed feedback or feedforward loops are introduced to achieve the stable control of the system, which include a gradient decreased feedback loop, a roll-pitch feed forward loop and a bias estimation feedback loop. This system, named FLVIS (Feedforward-feedback Loop-based Visual Inertial System), is evaluated on the popular EuRoc MAV dataset. FLVIS achieves high accuracy and robustness with respect to other state-of-the-art visual SLAM approaches. The system has also been implemented and tested on a UAV platform. The source code of this research is public to the research community.