 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlexible Multitask Learning with Factorized Diffusion Policy
Dec 26, 2025Multitask learning poses significant challenges due to the highly multimodal and diverse nature of robot action distributions. However, effectively fitting policies to these complex task distributions is often difficult, and existing monolithic models often underfit the action distribution and lack the flexibility required for efficient adaptation. We introduce a novel modular diffusion policy framework that factorizes complex action distributions into a composition of specialized diffusion models, each capturing a distinct sub-mode of the behavior space for a more effective overall policy. In addition, this modular structure enables flexible policy adaptation to new tasks by adding or fine-tuning components, which inherently mitigates catastrophic forgetting. Empirically, across both simulation and real-world robotic manipulation settings, we illustrate how our method consistently outperforms strong modular and monolithic baselines.
Safe Leaf Manipulation for Accurate Shape and Pose Estimation of Occluded Fruits
Sep 25, 2024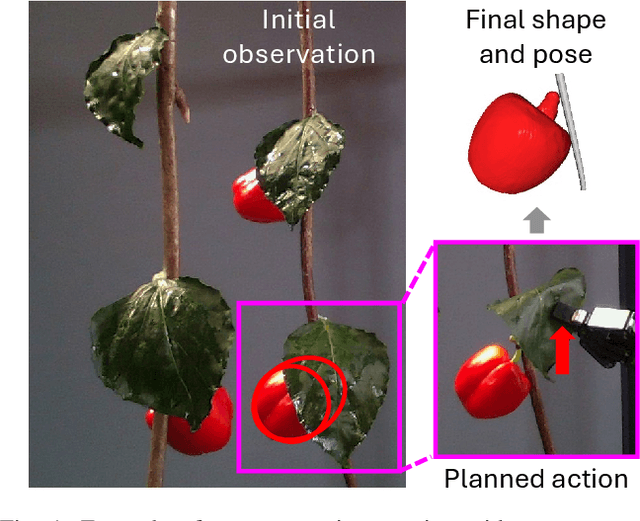
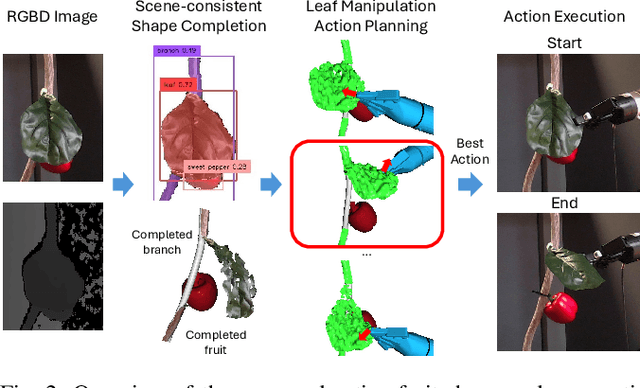
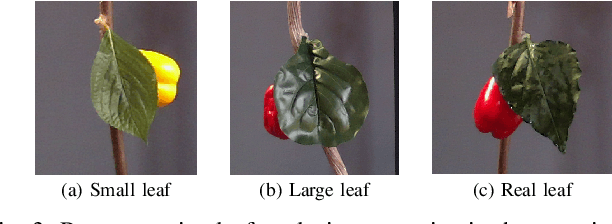
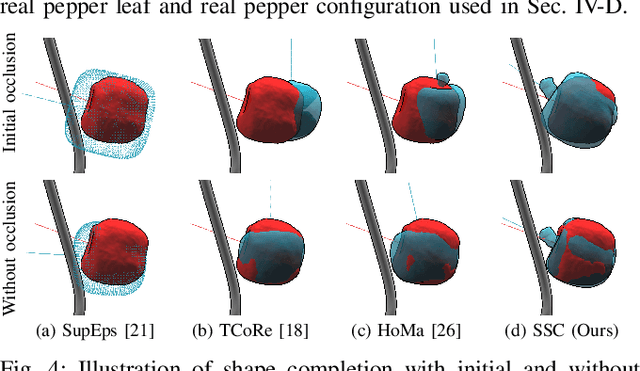
Fruit monitoring plays an important role in crop management, and rising global fruit consumption combined with labor shortages necessitates automated monitoring with robots. However, occlusions from plant foliage often hinder accurate shape and pose estimation. Therefore, we propose an active fruit shape and pose estimation method that physically manipulates occluding leaves to reveal hidden fruits. This paper introduces a framework that plans robot actions to maximize visibility and minimize leaf damage. We developed a novel scene-consistent shape completion technique to improve fruit estimation under heavy occlusion and utilize a perception-driven deformation graph model to predict leaf deformation during planning. Experiments on artificial and real sweet pepper plants demonstrate that our method enables robots to safely move leaves aside, exposing fruits for accurate shape and pose estimation, outperforming baseline methods. Project page: https://shaoxiongyao.github.io/lmap-ssc/.
3D Force and Contact Estimation for a Soft-Bubble Visuotactile Sensor Using FEM
Oct 17, 2023
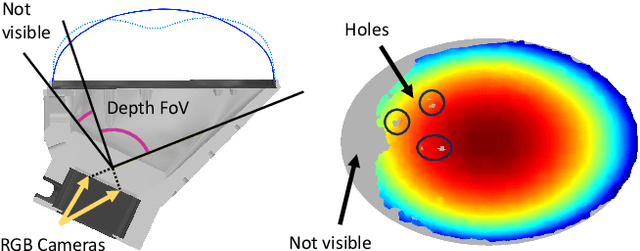
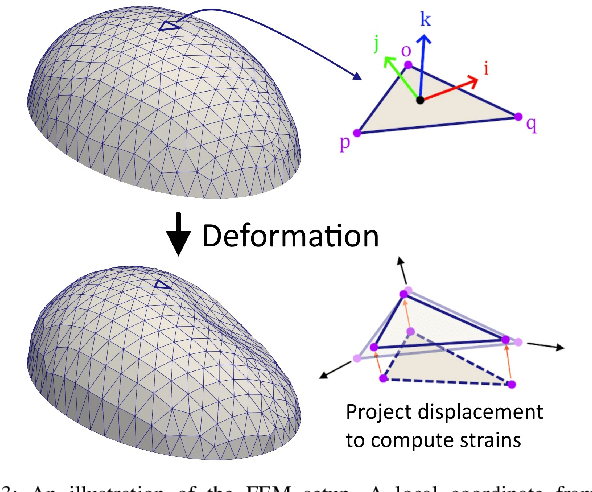
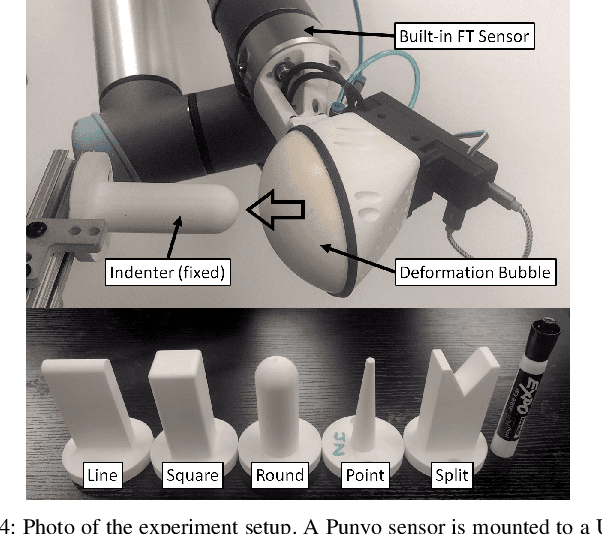
Soft-bubble tactile sensors have the potential to capture dense contact and force information across a large contact surface. However, it is difficult to extract contact forces directly from observing the bubble surface because local contacts change the global surface shape significantly due to membrane mechanics and air pressure. This paper presents a model-based method of reconstructing dense contact forces from the bubble sensor's internal RGBD camera and air pressure sensor. We present a finite element model of the force response of the bubble sensor that uses a linear plane stress approximation that only requires calibrating 3 variables. Our method is shown to reconstruct normal and shear forces significantly more accurately than the state-of-the-art, with comparable accuracy for detecting the contact patch, and with very little calibration data.