 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Force and Contact Estimation for a Soft-Bubble Visuotactile Sensor Using FEM
Paper and Code
Oct 17, 2023
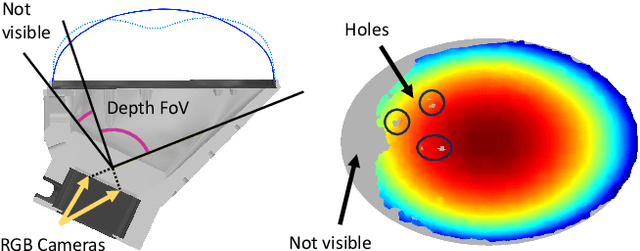
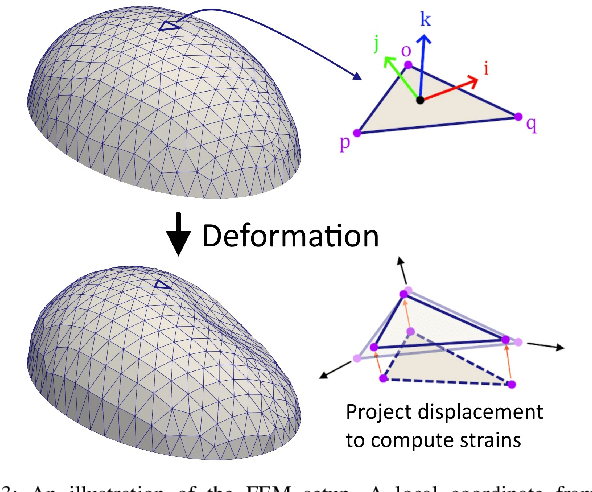
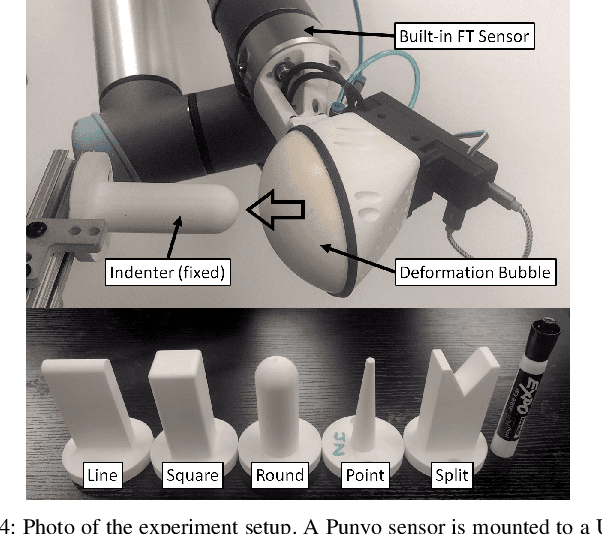
Soft-bubble tactile sensors have the potential to capture dense contact and force information across a large contact surface. However, it is difficult to extract contact forces directly from observing the bubble surface because local contacts change the global surface shape significantly due to membrane mechanics and air pressure. This paper presents a model-based method of reconstructing dense contact forces from the bubble sensor's internal RGBD camera and air pressure sensor. We present a finite element model of the force response of the bubble sensor that uses a linear plane stress approximation that only requires calibrating 3 variables. Our method is shown to reconstruct normal and shear forces significantly more accurately than the state-of-the-art, with comparable accuracy for detecting the contact patch, and with very little calibration data.