 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Paragraph is All It Takes: Rich Robot Behaviors from Interacting, Trusted LLMs
Dec 24, 2024
Large Language Models (LLMs) are compact representations of all public knowledge of our physical environment and animal and human behaviors. The application of LLMs to robotics may offer a path to highly capable robots that perform well across most human tasks with limited or even zero tuning. Aside from increasingly sophisticated reasoning and task planning, networks of (suitably designed) LLMs offer ease of upgrading capabilities and allow humans to directly observe the robot's thinking. Here we explore the advantages, limitations, and particularities of using LLMs to control physical robots. The basic system consists of four LLMs communicating via a human language data bus implemented via web sockets and ROS2 message passing. Surprisingly, rich robot behaviors and good performance across different tasks could be achieved despite the robot's data fusion cycle running at only 1Hz and the central data bus running at the extremely limited rates of the human brain, of around 40 bits/s. The use of natural language for inter-LLM communication allowed the robot's reasoning and decision making to be directly observed by humans and made it trivial to bias the system's behavior with sets of rules written in plain English. These rules were immutably written into Ethereum, a global, public, and censorship resistant Turing-complete computer. We suggest that by using natural language as the data bus among interacting AIs, and immutable public ledgers to store behavior constraints, it is possible to build robots that combine unexpectedly rich performance, upgradability, and durable alignment with humans.
D-Cubed: Latent Diffusion Trajectory Optimisation for Dexterous Deformable Manipulation
Mar 19, 2024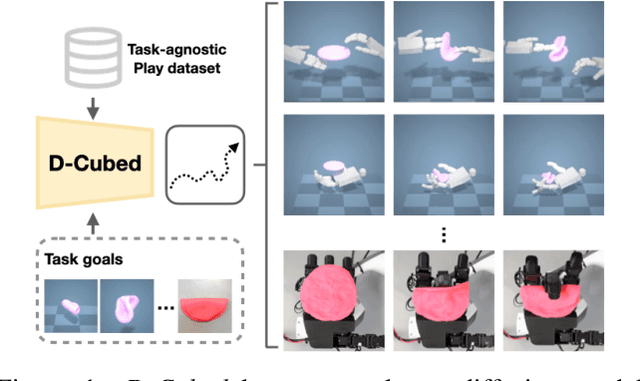

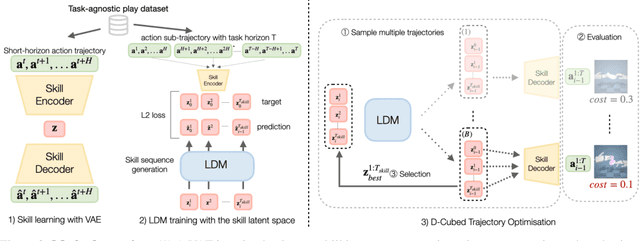
Mastering dexterous robotic manipulation of deformable objects is vital for overcoming the limitations of parallel grippers in real-world applications. Current trajectory optimisation approaches often struggle to solve such tasks due to the large search space and the limited task information available from a cost function. In this work, we propose D-Cubed, a novel trajectory optimisation method using a latent diffusion model (LDM) trained from a task-agnostic play dataset to solve dexterous deformable object manipulation tasks. D-Cubed learns a skill-latent space that encodes short-horizon actions in the play dataset using a VAE and trains a LDM to compose the skill latents into a skill trajectory, representing a long-horizon action trajectory in the dataset. To optimise a trajectory for a target task, we introduce a novel gradient-free guided sampling method that employs the Cross-Entropy method within the reverse diffusion process. In particular, D-Cubed samples a small number of noisy skill trajectories using the LDM for exploration and evaluates the trajectories in simulation. Then, D-Cubed selects the trajectory with the lowest cost for the subsequent reverse process. This effectively explores promising solution areas and optimises the sampled trajectories towards a target task throughout the reverse diffusion process. Through empirical evaluation on a public benchmark of dexterous deformable object manipulation tasks, we demonstrate that D-Cubed outperforms traditional trajectory optimisation and competitive baseline approaches by a significant margin. We further demonstrate that trajectories found by D-Cubed readily transfer to a real-world LEAP hand on a folding task.
Natural Language Processing for Systems Engineering: Automatic Generation of Systems Modelling Language Diagrams
Aug 09, 2022



The design of complex engineering systems is an often long and articulated process that highly relies on engineers' expertise and professional judgment. As such, the typical pitfalls of activities involving the human factor often manifest themselves in terms of lack of completeness or exhaustiveness of the analysis, inconsistencies across design choices or documentation, as well as an implicit degree of subjectivity. An approach is proposed to assist systems engineers in the automatic generation of systems diagrams from unstructured natural language text. Natural Language Processing (NLP) techniques are used to extract entities and their relationships from textual resources (e.g., specifications, manuals, technical reports, maintenance reports) available within an organisation, and convert them into Systems Modelling Language (SysML) diagrams, with particular focus on structure and requirement diagrams. The intention is to provide the users with a more standardised, comprehensive and automated starting point onto which subsequently refine and adapt the diagrams according to their needs. The proposed approach is flexible and open-domain. It consists of six steps which leverage open-access tools, and it leads to an automatic generation of SysML diagrams without intermediate modelling requirement, but through the specification of a set of parameters by the user. The applicability and benefits of the proposed approach are shown through six case studies having different textual sources as inputs, and benchmarked against manually defined diagram elements.