 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploiting Expertise of Non-Expert and Diverse Agents in Social Bandit Learning: A Free Energy Approach
Mar 12, 2026Personalized AI-based services involve a population of individual reinforcement learning agents. However, most reinforcement learning algorithms focus on harnessing individual learning and fail to leverage the social learning capabilities commonly exhibited by humans and animals. Social learning integrates individual experience with observing others' behavior, presenting opportunities for improved learning outcomes. In this study, we focus on a social bandit learning scenario where a social agent observes other agents' actions without knowledge of their rewards. The agents independently pursue their own policy without explicit motivation to teach each other. We propose a free energy-based social bandit learning algorithm over the policy space, where the social agent evaluates others' expertise levels without resorting to any oracle or social norms. Accordingly, the social agent integrates its direct experiences in the environment and others' estimated policies. The theoretical convergence of our algorithm to the optimal policy is proven. Empirical evaluations validate the superiority of our social learning method over alternative approaches in various scenarios. Our algorithm strategically identifies the relevant agents, even in the presence of random or suboptimal agents, and skillfully exploits their behavioral information. In addition to societies including expert agents, in the presence of relevant but non-expert agents, our algorithm significantly enhances individual learning performance, where most related methods fail. Importantly, it also maintains logarithmic regret.
Subgoal Discovery Using a Free Energy Paradigm and State Aggregations
Dec 21, 2024



Reinforcement learning (RL) plays a major role in solving complex sequential decision-making tasks. Hierarchical and goal-conditioned RL are promising methods for dealing with two major problems in RL, namely sample inefficiency and difficulties in reward shaping. These methods tackle the mentioned problems by decomposing a task into simpler subtasks and temporally abstracting a task in the action space. One of the key components for task decomposition of these methods is subgoal discovery. We can use the subgoal states to define hierarchies of actions and also use them in decomposing complex tasks. Under the assumption that subgoal states are more unpredictable, we propose a free energy paradigm to discover them. This is achieved by using free energy to select between two spaces, the main space and an aggregation space. The $model \; changes$ from neighboring states to a given state shows the unpredictability of a given state, and therefore it is used in this paper for subgoal discovery. Our empirical results on navigation tasks like grid-world environments show that our proposed method can be applied for subgoal discovery without prior knowledge of the task. Our proposed method is also robust to the stochasticity of environments.
Semi-Supervised Learning Approach for Efficient Resource Allocation with Network Slicing in O-RAN
Jan 16, 2024The Open Radio Access Network (O-RAN) technology has emerged as a promising solution for network operators, providing them with an open and favorable environment. Ensuring effective coordination of x-applications (xAPPs) is crucial to enhance flexibility and optimize network performance within the O-RAN. In this paper, we introduce an innovative approach to the resource allocation problem, aiming to coordinate multiple independent xAPPs for network slicing and resource allocation in O-RAN. Our proposed method focuses on maximizing the weighted throughput among user equipments (UE), as well as allocating physical resource blocks (PRBs). We prioritize two service types, namely enhanced Mobile Broadband and Ultra Reliable Low Latency Communication. To achieve this, we have designed two xAPPs: a power control xAPP for each UE and a PRB allocation xAPP. The proposed method consists of a two-part training phase, where the first part uses supervised learning with a Variational Autoencoder trained to regress the power transmission as well as the user association and PRB allocation decisions, and the second part uses unsupervised learning with a contrastive loss approach to improve the generalization and robustness of the model. We evaluate the performance of our proposed method by comparing its results to those obtained from an exhaustive search algorithm, deep Q-network algorithm, and by reporting performance metrics for the regression task. We also evaluate the proposed model's performance in different scenarios among the service types. The results show that the proposed method is a more efficient and effective solution for network slicing problems compared to state-of-the-art methods.
Reinforcement Learning with Subspaces using Free Energy Paradigm
Dec 13, 2020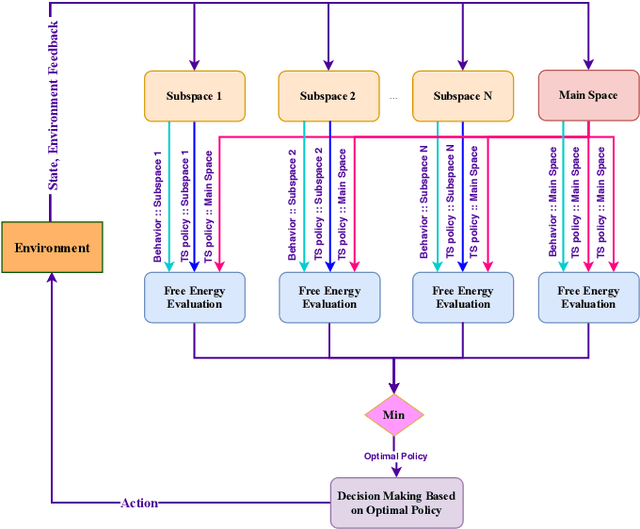
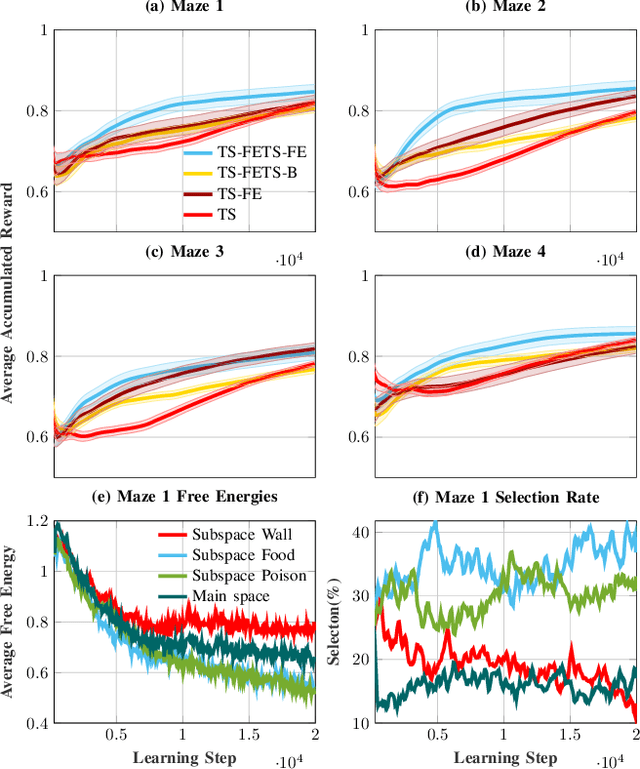
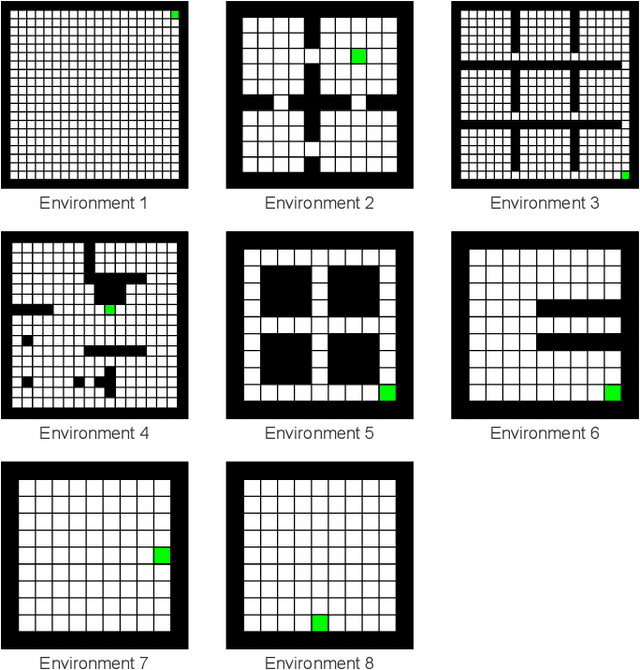
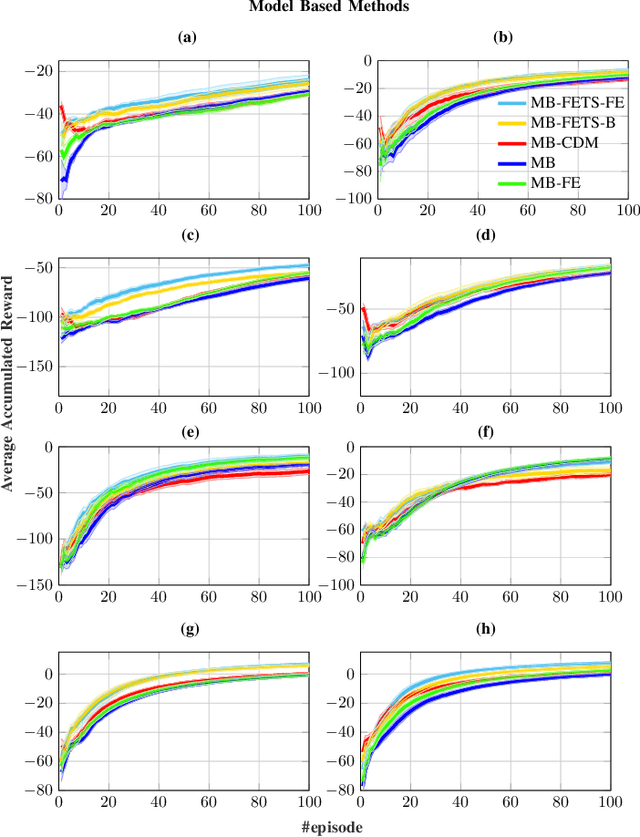
In large-scale problems, standard reinforcement learning algorithms suffer from slow learning speed. In this paper, we follow the framework of using subspaces to tackle this problem. We propose a free-energy minimization framework for selecting the subspaces and integrate the policy of the state-space into the subspaces. Our proposed free-energy minimization framework rests upon Thompson sampling policy and behavioral policy of subspaces and the state-space. It is therefore applicable to a variety of tasks, discrete or continuous state space, model-free and model-based tasks. Through a set of experiments, we show that this general framework highly improves the learning speed. We also provide a convergence proof.