 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurgical Vision World Model
Mar 03, 2025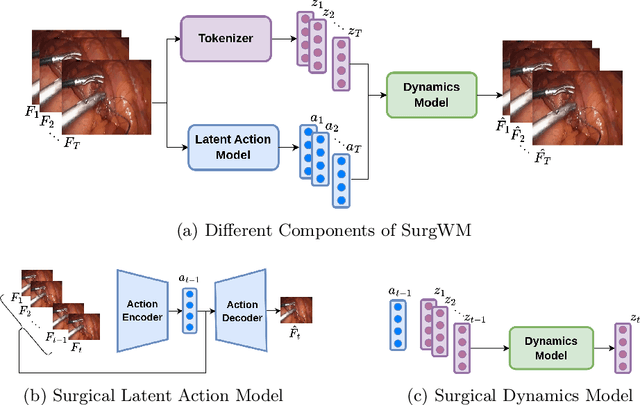
Realistic and interactive surgical simulation has the potential to facilitate crucial applications, such as medical professional training and autonomous surgical agent training. In the natural visual domain, world models have enabled action-controlled data generation, demonstrating the potential to train autonomous agents in interactive simulated environments when large-scale real data acquisition is infeasible. However, such works in the surgical domain have been limited to simplified computer simulations, and lack realism. Furthermore, existing literature in world models has predominantly dealt with action-labeled data, limiting their applicability to real-world surgical data, where obtaining action annotation is prohibitively expensive. Inspired by the recent success of Genie in leveraging unlabeled video game data to infer latent actions and enable action-controlled data generation, we propose the first surgical vision world model. The proposed model can generate action-controllable surgical data and the architecture design is verified with extensive experiments on the unlabeled SurgToolLoc-2022 dataset. Codes and implementation details are available at https://github.com/bhattarailab/Surgical-Vision-World-Model