 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign of a Health Monitoring System for a Planetary Exploration Rover
Jul 04, 2024



It is generally considered that a trustworthy autonomous planetary exploration rover must be able to operate safely and effectively within its environment. Central to trustworthy operation is the ability for the rover to recognise and diagnose abnormal behaviours during its operation. Failure to diagnose faulty behaviour could lead to degraded performance or an unplanned halt in operation. This work investigates a health monitoring method that can be used to improve the capabilities of a fault detection system for a planetary exploration rover. A suite of four metrics, named 'rover vitals', are evaluated as indicators of degradation in the rover's performance. These vitals are combined to give an overall estimate of the rover's 'health'. By comparing the behaviour of a faulty real system with a non-faulty observer, residuals are generated in terms of two high-level metrics: heading and velocity. Adaptive thresholds are applied to the residuals to enable the detection of faulty behaviour, where the adaptive thresholds are informed by the rover's perceived health. Simulation experiments carried out in MATLAB showed that the proposed health monitoring and fault detection methodology can detect high-risk faults in both the sensors and actuators of the rover.
A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams
May 21, 2024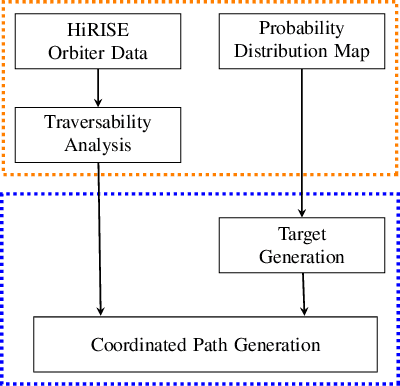



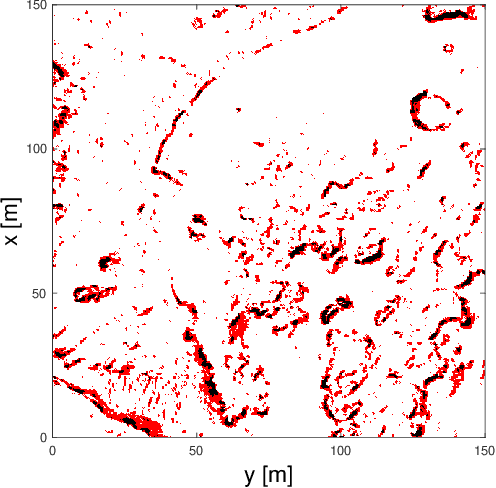
One of the fundamental limiting factors in planetary exploration is the autonomous capabilities of planetary exploration rovers. This study proposes a novel methodology for trustworthy autonomous multi-robot teams which incorporates data from multiple sources (HiRISE orbiter imaging, probability distribution maps, and on-board rover sensors) to find efficient exploration routes in Jezero crater. A map is generated, consisting of a 3D terrain model, traversability analysis, and probability distribution map of points of scientific interest. A three-stage mission planner generates an efficient route, which maximises the accumulated probability of identifying points of interest. A 4D RRT* algorithm is used to determine smooth, flat paths, and prioritised planning is used to coordinate a safe set of paths. The above methodology is shown to coordinate safe and efficient rover paths, which ensure the rovers remain within their nominal pitch and roll limits throughout operation.
Enhancing Reinforcement Learning in Sensor Fusion: A Comparative Analysis of Cubature and Sampling-based Integration Methods for Rover Search Planning
May 15, 2024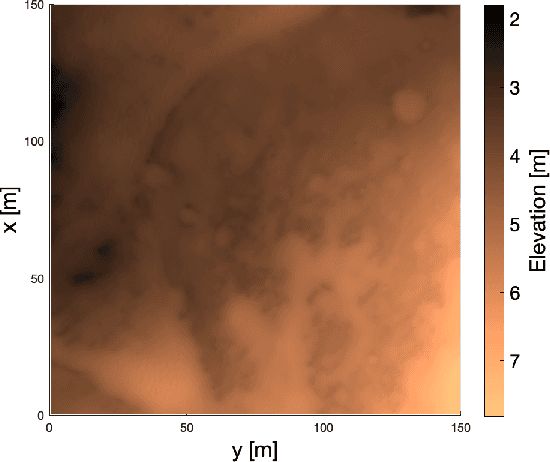
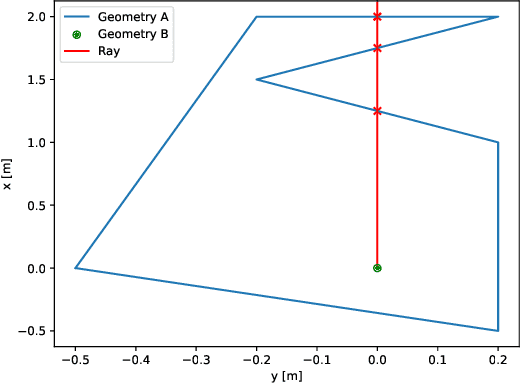
This study investigates the computational speed and accuracy of two numerical integration methods, cubature and sampling-based, for integrating an integrand over a 2D polygon. Using a group of rovers searching the Martian surface with a limited sensor footprint as a test bed, the relative error and computational time are compared as the area was subdivided to improve accuracy in the sampling-based approach. The results show that the sampling-based approach exhibits a $14.75\%$ deviation in relative error compared to cubature when it matches the computational performance at $100\%$. Furthermore, achieving a relative error below $1\%$ necessitates a $10000\%$ increase in relative time to calculate due to the $\mathcal{O}(N^2)$ complexity of the sampling-based method. It is concluded that for enhancing reinforcement learning capabilities and other high iteration algorithms, the cubature method is preferred over the sampling-based method.